-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.0 2024-06-28 데이터 개방 Beta Version 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2024-06-28 산출물 공개 Beta Version 소개
- 20년도 기구축 데이터의 고도화 사업으로 세부 내용인 실내 다중이용시설에 최적화된 데이터 구축을 위해 다양한 조건 및 환경적 특성을 반영한 실내 다중이용시설 대상 로봇 AI 자율주행 알고리즘 개발의 기반 데이터를 구축함
구축목적
- LiDAR+RGB-D를 이용한 실내 객체 식별 모델 및 실내 다중이용시설 SLAM모델 구축 - 소셜 내비게이션 로봇 주행을 위한 학습용 융합 데이터셋 구축
-
메타데이터 구조표 데이터 영역 로보틱스 데이터 유형 3D , 이미지 , 텍스트 데이터 형식 mp4, jpg, png, pcd, csv 데이터 출처 직접 촬영을 통한 데이터 획득 라벨링 유형 바운딩박스, 큐보이드, 동작 구간 태깅 라벨링 형식 JSON 데이터 활용 서비스 실내 다중이용시설 자율주행 로봇 산업 및 AI 자율주행 알고리즘 개발 활용 데이터 구축년도/
데이터 구축량2023년/원천 데이터 - RGB-D 이미지 데이터 (JPG) : 2,528 클립 - RGB-D 데이터 (MP4) : 150,229 장 - RGB-D(Depth) 데이터 (PNG) : 150,229 건 - LiDAR 데이터 (PCD) : 150,229 건 - 6D IMU Sensor 데이터 (CSV) : 2,528 건 / 라벨링 데이터 - JSON : 150,229 건 / Other 데이터 - 로봇 도면(dwg/step) : 14 건 - 수집 장소 도면(pdf) : 12 건 -
- 데이터 구축 규모
데이터 구축 규모 구 분 포맷 수량 85번 원천 데이터 RGB-D 이미지 데이터 (JPG) 2,528 클립 RGB-D 데이터 (MP4) 150,229 장 RGB-D(Depth) 데이터 (PNG) 150,229 건 LiDAR 데이터 (PCD) 150,229 건 6D IMU Sensor 데이터 (CSV) 2,528 건 라벨링 데이터 JSON 150,229 건 Other 데이터 로봇 도면(dwg/step) 14 건 수집 장소 도면(pdf) 12 건 - 클래스 분포
클래스 분포 항목 구축량(건) 구성비 정적 개체 테이블 1,238 3.44% 데스크 52 0.14% 기둥 1,101 3.06% 소화기 261 0.72% 조형물 675 1.87% 쓰레기통 63 0.17% 계산대 256 0.71% 펜스 11 0.03% 안내판 37 0.10% 진열대 123 0.34% 의자 5,613 15.59% 발권기 0 0% 표지판 2 0.01% 자동차 329 0.91% 동적 개체 사람 26,248 72.89% 합계 36,009 100% - 로봇 분포
로봇 분포 항목 구축량(건) 구성비(%) 4족보행로봇(RB1) 68,980 46% 바퀴주행로봇(RB2) 81,249 54% 합계 150,229 100% - 장소별 분포
장소별 분포 항목 구축량(건) 구성비(%) 대형식당(PL01) 11,364 8% 전시장(PL02) 10,657 7% 체육시설(PL03) 12,143 8% 공연장(PL04) 12,389 8% 지하상가(PL05) 12,979 9% 실내주차장(PL06) 11,290 8% 대형마트(PL07) 9,922 7% 중형식당(PL08) 14,316 10% 은행(PL09) 14,266 9% 예식장(PL10) 13,210 9% 터미널(PL11) 14,096 9% 교회(PL12) 13,597 9% 합계 150,229 100% - 조종사 조향 조작 분포
조종사 조향 조작 분포 항목 구축량(건) 구성비 조종사1(P1) 39,306 26.16% 조종사2(P2) 34,546 23.00% 조종사3(P3) 38,403 25.56% 조종사4(P4) 37,974 25.28% 합계 150,229 100% - 시나리오별 분포
시나리오별 분포 항목 구축량(건) 구성비 시나리오1(SN01) 16,695 11.11% 시나리오2(SN02) 15,210 10.12% 시나리오3(SN03) 15,262 10.16% 시나리오4(SN04) 14,482 9.64% 시나리오5(SN05) 14,608 9.72% 시나리오6(SN06) 14,243 9.48% 시나리오7(SN07) 14,896 9.92% 시나리오8(SN08) 15,107 10.06% 시나리오9(SN09) 14,443 9.61% 시나리오10(SN10) 15,283 10.17% 합계 150,229 100% -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드- 학습 모델
1) 바운딩박스 객체 검출 성능
바운딩박스 객체 검출 성능 YOLOv7 YOLOv7은 ELAN을 기반으로 한 확장 모델인 E-ELAN 구조의 아키텍처를 사용하여 네트워크의 효율적인 expand, shuffle, merge cardinality를 통해 Original Gradient Path를 파괴하지 않고, 네트워크의 학습 능력을 향상했고, Re parametrization을 통해 추론 시 비용을 늘리지 않고 정확도를 향상할 수 있도록 했다. 또한 모델 스케일링을 통해 입력과 출력의 너비를 유지하면서 깊이만 스케일링 하는 기술을 제안하여 연산량을 감소시켰다.
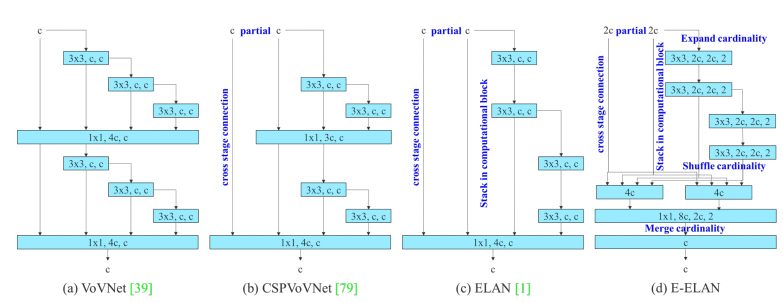
[그림3] YOLOv7 기존 아키텍처 및 E-ELAN
위 그림은 각 YOLOv7의 기존 아키텍처와 E-ELAN을 나타내며, 아키텍처 측면에서 E-ELEN은 계산 블록의 아키텍처만 변경하고, group convolution을 사용하여 계산 블록의 채널과 cardinality를 확장하고 모든 계산 블록에 동일한 그룹 파라미터와 channel multiplier를 적용한다. 이후 계산된 feature map은 설정된 그룹 파라미터에 따라 석인 이후 결합한다.2) 큐보이드 객체 검출 성능
큐보이드 객체 검출 성능 FocalsConv Focals Conv는 모든 희소 데이터를 처리하는 Sparse CNN에 위치별 중요도 예측으로 feature 희소성을 학습하는 Focals Conv와 multi-modal 변형인 Focals Conv-F를 제안하고, 여러 벤치마크 데이터셋에서 높은 성능을 보이며 학습 가능한 희소성이 정교한 3D 객체 감지에 필수적임을 증명함
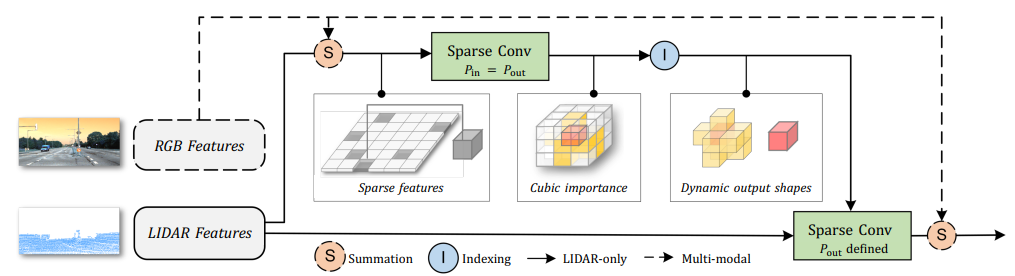
[그림4] Focals Convs의 전체 구조
2D 이미지에서 RGB feature를 추출하고 LiDAR feature를 그에 맞춤. 추출된 RGB feature는 Convolution 계층과 MLP 계층을 통과하여 LiDAR feature와 결합하여 입방체 중요도 예측에 기여하고, 마지막 Sparse Conv 출력 feature에 결합하여 최종 출력 감독 역할을 함. 중요도 예측 분기에서 Focal Loss와 Attention 방법을 적용하여 학습함
LiDAR + RGB-D를 사용하기 위해 Focals conv에서 제안한 RGB (3 chennel)에서 Depth map (1 chennel)을 concatnation하여 사용할 예정임. 아래의 이미지는 기존 Focals conv model 에서 depth map을 추가하여 학습하는 모식도를 보인다.3) SLAM 성능
SLAM 성능 FAST-LIO2 FAST-LIO2 알고리즘은 FAST-LIO에서 제시된 향상된 칼만 필터 방식과 더불어 기존의 Feature 추출 방식을 사용하지 않고 Raw Pointcloud 데이터를 맵에 업데이트를 하는 알고리즘임 맵을 관리 할 수 있는 ikd-tree 구조를 제시하였고, 이전 연구의 FAST-LIO에서 제시한 강력하게 결합 된 반복 확장 Kalman 필터를 사용하여 Odometry를 최적화하였음
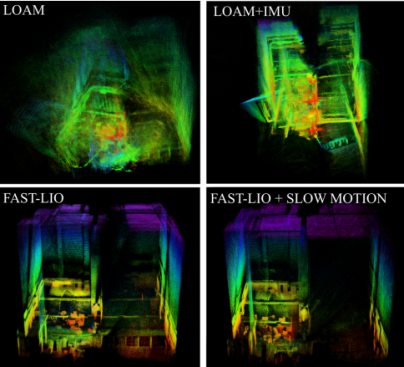
[그림5] FAST-LIO2 알고리즘 예시 이미지
- 유효성 검증 환경
1) 바운딩 박스 객체 검출 유효성 검증바운딩 박스 객체 검출 유효성 검증 유효성 검증 항목 항목명 바운딩 박스 객체 검출 성능 검증 방법 2D Object Detection 학습 및 검증 수행 목적 2D 객체 검출을 통한 객체 라벨링 유효성 검증 지표 mAP(Mean Average Precision) 측정 산식 
도커 이미지 2D_Docker.tar.gz ( 8.88 GB ) 실행 파일명 학습 : train.py , 검증 : test.py 유효성 검증 환경 CPU AMD EPYC 7742 64-Core Processor * 2 Memory 503G GPU NVIDIA RTX A6000 * 4 Storage 30.4TB OS Ubuntu 18.04.6 LTS 유효성 검증 모델 학습 및 검증 조건 개발 언어 Python 3.7.13 프레임워크 프레임워크 프레임워크 및 라이브러리 버전 torch 1.12.1 학습 알고리즘 YOLOv7 학습 조건 학습 조건 no 파라미터 파라미터 값 1 epoch 100 2 learning rate 0.01 3 weight decay 0.0005 4 momentum 0.937 5 mixup 0.15 6 box 0.05 7 batch size 32 8 image size (640, 640) 파일 형식 학습 : RGB-Image(.jpg) / Label-file(.json) 검증 : RGB-Image(.jpg) / Label-file(.json) 전체 구축 데이터 대비
모델에 적용되는 비율AI 모델 사용 이미지 비율
- 구축된 전체 데이터 100%모델 학습 과정별
데이터 분류 및 비율 정보Train : Val : Test = 80 : 10 : 10
※ 분류 기준
- Training Set 비율 80% (120,220개)
- Validation Set 비율 10% (14,993개)
- Test Set 비율 10% (15,016개)모델 학습 과정별 데이터 분류 및 비율 정보 no 클래스 Total Train Val Test 1 counter 969 785 119 65 2 pillar 32,361 25,207 2,873 4,287 3 desk 5,556 4,078 260 1,218 4 fire_extinguisher 3,886 3,151 393 342 5 wastebasket 2,055 1,737 0,167 151 6 information_board 1,523 1,302 165 56 7 chair 73,913 61,012 6,611 6,290 8 car 9,787 7,768 1,469 550 9 sculpture 3,083 2,332 256 495 10 display_stand 9,064 7,562 876 626 11 table 12,790 10,394 1,198 1,198 12 fence 4,633 3,383 346 904 13 sign 1,530 1,116 138 276 14 person 170,499 136,034 17,738 16,727 전체 수량 331,649 265,861 32,609 33,185 2) 큐보이드 객체 검출 유효성 검증
큐보이드 객체 검출 유효성 검증 유효성 검증 항목 항목명 큐보이드 객체 검출 성능 검증 방법 3D Object Detection 학습 및 검증 수행 목적 3D 객체 검출을 통한 객체 라벨링 유효성 검증 지표 mAP(Mean Average Precision) 측정 산식 
도커 이미지 3D_Docker.tar.gz ( 8.61 GB ) 실행 파일명 python run_test.py 유효성 검증 환경 CPU AMD EPYC 7742 64-Core Processor * 2 Memory 503G GPU NVIDIA RTX A6000 * 4 Storage 30.4TB OS Ubuntu 18.04.6 LTS 유효성 검증 모델 학습 및 검증 조건 개발 언어 Python 3.7.13 프레임워크 프레임워크 프레임워크 및 라이브러리 버전 pcdet 0.6.0+255db8f(별도 코드 설치) torch 1.12.1 학습 알고리즘 FocalsConv (OpenPCDet) 학습 조건 학습 조건 no 파라미터 파라미터 값 1 epoch 160 2 learning rate 0.01 3 weight decay 0.01 4 momentum 0.9 5 learning rate decay 0.1 6 learning rate clip 0.0000001 7 optimizer adam_onecycle 8 grad norm clip 10 파일 형식 학습 : RGB-Image(.jpg) , Depth-Image(.png), LiDAR-PointCloud(.pcd) ,Label-file(.json) 검증 : RGB-Image(.jpg) , Depth-Image(.png), LiDAR-PointCloud(.pcd), Label-file(.json) 전체 구축 데이터 대비
모델에 적용되는 비율AI 모델 사용 이미지 비율
- 구축된 전체 데이터 100%모델 학습 과정별
데이터 분류 및 비율 정보Train : Val : Test = 80 : 10 : 10
※ 분류 기준
- Training Set 비율 80% (120,220개)
- Validation Set 비율 10% (14,993개)
- Test Set 비율 10% (15,016개)모델 학습 과정별 데이터 분류 및 비율 정보 no 클래스 Total Train Val Test 1 counter 969 785 119 65 2 pillar 32,361 25,207 2,873 4,287 3 desk 5,556 4,078 260 1,218 4 fire_extinguisher 3,886 3,151 393 342 5 wastebasket 2,055 1,737 0,167 151 6 information_board 1,523 1,302 165 56 7 chair 73,913 61,012 6,611 6,290 8 car 9,787 7,768 1,469 550 9 sculpture 3,083 2,332 256 495 10 display_stand 9,064 7,562 876 626 11 table 12,790 10,394 1,198 1,198 12 fence 4,633 3,383 346 904 13 sign 1,530 1,116 138 276 14 person 170,499 136,034 17,738 16,727 전체 수량 331,649 265,861 32,609 33,185 3) SLAM 성능 유효성 검증
SLAM 성능 유효성 검증 유효성 검증 항목 항목명 SLAM 성능 검증 방법 Docker Image 제출 및 현장점검 등 목적 로봇의 이동경로 정확성 측정 지표 End to End RMSE 측정 산식 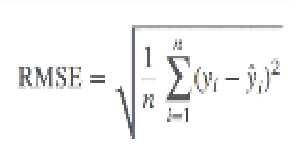
도커 이미지 SLAM_Docker.tar.gz ( 10 GB ) 실행 파일명 python run_slam.py 유효성 검증 환경 CPU AMD EPYC 7742 64-Core Processor Memory 53G GPU 사용 안함 Storage 1.8T OS Ubuntu 20.04 유효성 검증 모델 학습 및 검증 조건 개발 언어 C++ 프레임워크 프레임워크 프레임워크 및 라이브러리 버전 ROS1 noetic PCL 1.8 Eigen 3.3.4 학습 알고리즘 Fast-LIO2 학습 조건 학습 조건 no 파라미터 파라미터 값 1 lidar_type 2 2 scan_line 16 3 acc_cov 0.1 4 gyr_cov 0.1 파일 형식 학습 데이터셋 : - 평가 데이터셋 : bag 파일 전체 구축 데이터 대비
모델에 적용되는 비율SLAM 평가 데이터 비율
- 구축된 전체 데이터 100%모델 학습 과정별
데이터 분류 및 비율 정보Train : Val : Test = 0 : 0 : 100
※ 분류 기준
- Training Set 비율 -% (- 개)
- Validation Set 비율 -% (- 개)
- Test Set 비율 100% ( 2528 개)모델 학습 과정별 데이터 분류 및 비율 정보 no 클래스 Total Train Val Test 1 odometry (x,y) 2528 0 0 2528 제한사항 • SLAM 알고리즘의 경우 AI 인공지능 모델이 아니므로, 학습 및 검증용 데이터가 없습니다.
• GPU를 사용하지않는 알고리즘이며, CPU만을 사용합니다.
• 수집 당시에 취득한 RAW 데이터 Bag 파일을 입력으로 사용합니다. -
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드- 데이터 구성 및 구축 규모
데이터 구성 및 구축 규모 분류 원시데이터 원천데이터 라벨링데이터 RGB-D mp4 2,880클립 mp4 2,528클립 json 150,229장 jpg 150,229장 png 2,880건 png 150,229장 Lidar pcd 2,880건 pcd 150,229장 IMU 센서 csv 2,880건 csv
(메타데이터)2,528건 로봇 로그 csv 2,880건 수집환경 데이터 csv 2,880건 로봇 도면 step 2건 step 2건 - - dwg 12건 dwg 12건 수집장소도면 pdf 12건 pdf 12건 - - - 파일 디렉토리 구성
1) 원천 데이터
원천 데이터 1차 경로 2차 경로 3차 경로 4차 경로 5차 경로 6차 경로 7차 경로 파일 포맷 001.
원천데이터RB1 PL01 D1 P1 SN01 PCD PCD JPG JPG SN02 PCD PCD JPG JPG SN03 PCD PCD JPG JPG 2) 라벨링 데이터
라벨링 데이터 1차 경로 2차 경로 3차 경로 4차 경로 5차 경로 6차 경로 파일 포맷 002.
라벨데이터RB1 PL01 D1 P1 SN01 JSON SN02 JSON SN03 JSON - 경로 구분 정보
경로 구분 정보 경로 구분 정보 구분자 정보 Depth1(주행방식) 4족보행로봇 RB1 바퀴주행로봇 RB2 Depth2(장소) 대형식당 PL01 전시장 PL02 체육시설 PL03 공연장 PL04 지하상가 PL05 실내주차장 PL06 대형마트 PL07 중형 PL08 은행 PL09 예식장 PL10 터미널 PL11 교회 PL12 Depth3(주행패턴) 순환 D1 패턴 D2 지정 D3 Depth4(로봇조종사) 1번 조종사 P1 2번 조종사 P2 3번 조종사 P3 4번 조종사 P4 Depth5(시나리오별) 시나리오1 SN01 시나리오2 SN02 시나리오3 SN03 시나리오4 SN04 시나리오5 SN05 시나리오6 SN06 시나리오7 SN07 시나리오8 SN08 시나리오9 SN09 시나리오10 SN10 - 파일명 구성 정보
파일명 구성 정보 예시 세부 구성 설명 RB1_PL01_D1_P1_SN01_1_0001.jpg - RB1 : 4족보행로봇
- PL01 : 대형식당
- D1 : 순환주행
- P1 : 1번 조종사
- SN01 : 시나리오 1번
- 1 : 촬영 1회차
- 0001 : 원천데이터 순서
- 파일명 : RGB 이미지RB1_PL01_D1_P1_SN01_1_0001.pcd - RB1 : 4족보행로봇
- PL01 : 대형식당
- D1 : 순환주행
- P1 : 1번 조종사
- SN01 : 시나리오 1번
- 1 : 촬영 1회차
- 0001 : 원천데이터 순서
- 파일명 : PCD 데이터RB1_PL01_D1_P1_SN01_1_0001.json - RB1 : 4족보행로봇
- PL01 : 대형식당
- D1 : 순환주행
- P1 : 1번 조종사
- SN01 : 시나리오 1번
- 1 : 촬영 1회차
- 0001 : JSON 데이터 순서
- 파일명 : JSON 데이터- 장소별 객체 취득 구분
장소별 객체 취득 구분 장소 분류 객체 분류 클래스 분류 대형식당 정적객체 계산대, 테이블, 의자, 기둥, 안내판 동적객체 사람 전시장 정적객체 조형물, 기둥, 쓰레기통, 소화기 동적객체 사람 체육시설 정적객체 테이블 동적객체 사람 공연장 정적객체 의자, 쓰레기통, 소화기 동적객체 사람 지하상가 정적객체 의자, 기둥, 소화기 동적객체 사람 실내주차장 정적객체 표지판, 자동차, 기둥, 소화기 동적객체 사람 대형마트 정적객체 진열대, 안내판, 소화기 동적객체 사람 중형식당 정적객체 테이블, 의자, 기둥, 쓰레기통, 소화기 동적객체 사람 은행 정적객체 의자, 기둥, 쓰레기통, 소화기 동적객체 사람 예식장 정적객체 조형물, 테이블, 데스크, 기둥, 소화기 동적객체 사람 터미널 정적객체 표지판, 기둥, 소화기 동적객체 사람 교회 정적객체 테이블, 의자, 데스크, 펜스, 소화기 동적객체 사람 - 어노테이션 포맷
어노테이션 포맷 구분 항목명 타입 필수
여부설명 범위 비고 1 license object Y 라이센스 정보 - - 1-1 name string Y 라이센명 - - 1-2 id string Y 도구ID - - 1-3 url string Y 도구URL - - 2 info object Y 데이터 정보 - - 2-1 description string Y 데이터 부가 설명 - - 2-2 date_created string Y 데이터 생성일 - - 2-3 env object Y 데이터 수집
환경정보- - 3-1-1 site string Y 수집처 - - 3-2-2 location string Y 수집 장소 - - 3-3-3 address string N 수집 주소 - - 3-4-4 date string Y 수집일자 - - 3-5-5 weather string Y 수집일 날씨 - - 3-6-6 temperature number Y 수집일 기온 - - 3-7-7 lumen number Y 수집현장 조도 0~999 - 3-8-8 decibel number Y 수집현장
주변소음0~999 - 3-9-9 running_time string Y 수집데이터 길이
(동영상)- - 3-10-10 floor_material string Y 수집 장소
바닥재질- - 3-11-11 gate_material string Y 수집 장소
출입문 재질- - 3-12-12 wall_material string Y 수집 장소
벽면 재질- - 3-13-13 interaction_
starting_timestring N 상호작용
시작 시간- hh:mm:ss 3-14-14 interaction_
ending_timestring N 상호작용
시작 시간- hh:mm:ss 2-4 imu object Y 장비 계측 정보 - - 4-1-1 gyroscope_
orientation.xnumber Y 자이로스코프
X성분값-10~10 - 4-2-2 gyroscope_
orientation.ynumber Y 자이로스코프
Y성분값-10~10 - 4-3-3 gyroscope_
orientation.znumber Y 자이로스코프
Z성분값-10~10 - 4-4-4 gyroscope_
orientation.wnumber Y 자이로스코프
W성분값-10~10 - 4-5-5 magnetometer_
angular_velocity.xnumber Y 자기장측정기
X축값-10~10 - 4-6-6 magnetometer_
angular_velocity.ynumber Y 자기장측정기
Y축값-10~10 - 4-7-7 magnetometer_
angular_velocity.znumber Y 자기장측정기
z축값-10~10 - 4-8-8 accelerometer_
linear_acceleration.xnumber Y 가속도계 X축값 -30~30 - 4-9-9 accelerometer_
linear_acceleration.ynumber Y 가속도계 Y축값 -30~30 - 4-10-10 accelerometer_
linear_acceleration.znumber Y 가속도계 Z축값 -30~30 - 3 categories array Y 클래스 분류 - - 3-1 {} object Y - - - 3-2 id number Y 클래스별 아이디 - - 3-3 name string Y 클래스 아이디별
명칭- - 4 image array Y 이미지 정보 - - 4-1 id number Y 이미지 고유 ID - - 4-2 width number Y 이미지 가로 크기 0~1920 1920 4-3 height number Y 이미지 세로 크기 0~1080 1080 4-4 file_name string Y 이미지 파일명 - - 4-5 scenario object Y 시나리오 정보 - - 5-1-1 id number Y 시나리오 고유 ID - - 5-2-2 start_time string Y 시나리오
시작 일시- hh:mm:ss 5-3-3 end_time string Y 시나리오
종료 일시- hh:mm:ss 5-4-4 distance_traveled string Y 로봇 이동 거리 - - 5-5-5 len number Y 시나리오 전체
프레임수- - 5-6-6 index number Y 프레임 순번 - - 4-6 out_of_focus boolean N 원천데이터 이미지
흔들림 여부- true, false 5 annotations array N 어노테이션 정보 - - 5-1 {} object N - - - 5-2 id number Y 고유 ID - - 5-3 image_id string Y 이미지 고유 ID - - 5-4 category_id string Y 객체 고유 ID - - 5-5 bbox array Y bbox 정보 - - 5-1-1 $value$ array Y 어노테이션 좌표
및 사이즈- - 5-6 attributes object N 어노테이션 속성 - - 6-1-1 is_social_interaction boolean N 상호작용 여부 - true, false 6 pcd_images array Y PCD 정보 - - 6-1 id number Y PCD 고유 ID - - 6-2 file_name string Y PCD 파일명 - - 7 pcd_annotations array N PCD 어노테이션
정보- - 7-1 {} object N - - - 7-2 obj_id number Y 가공객체 고유 ID - - 7-3 type string Y 어노테이션 방식 - - 7-4 obj_type string Y 객체 클래스 - - 7-5 psr object Y PCD 어노테이션
좌표값- - 5-1-1 scale object Y Cuboid 가로,
세로, 높이 길이값- - 7-5-1-1 x number Y 가로 길이값 - - 7-5-1-2 y number Y 세로 길이값 - - 7-5-1-3 z number Y 높이 길이값 - - 5-2-2 position object Y Cuboid의 중심점의
3차원 좌표값- - 7-5-2-1 x number Y 3차원 x좌표값 - - 7-5-2-2 y number Y 3차원 y좌표값 - - 7-5-2-3 z number Y 3차원 z좌표값 - - 5-3-3 rotation object Y Cuboid의 방향값 - - 7-5-3-1 x number Y x축 방향값 - - 7-5-3-2 y number Y y축 방향값 - - 7-5-3-3 z number Y z축 방향값 - - - 데이터 실제 예시
1) 원천 데이터
(1) 2D(RGB 이미지)
[그림1] 원천 데이터 2D 이미지
(2) 2D(Lidar – PCD 포인트 클라우드 데이터)
[그림2] 원천 데이터 3D 이미지
2) 라벨데이터(JSON){
"licenses": [
{
"name": "blackolive",
"url": "https://bo.testworks.ai/"
}
],
"info": {
"description": "[Bounding Box]로봇관점 주행영상(고도화)",
"date_created": "2023-09-20 17:07:46.572397+09:00",
"env": {
"site": "한밭대학교",
"location": "국제교류관 1층 역사비전실",
"address": "대전광역시 유성구 동서대로 125",
"date": "2023-08-23",
"weather": "흐림",
"temperature": "29.8",
"lumen": "595",
"decibel": "55.5",
"running_time": "0:03:32",
"floor_material": "마루바닥“
"gate_material": "유리문",
"wall_material": "유리통창",
"interaction_starting_time": "0:01:03",
"interaction_starting_time": "0:03:30",
}
"imu": {
"gyroscope_orientation.x": "0.8652079105377197",
"gyroscope_orientation.y": "-0.501127779483795",
"gyroscope_orientation.z": "0.0029802438803017",
"gyroscope_orientation.w": "0.8652079105377197",
"magnetometer_angular_velocity.x": "-0.0166074056178331",
"magnetometer_angular_velocity.y": "-0.0160168912261724",
"magnetometer_angular_velocity.z": "0.5337373614311218",
"accelerometer_linear_acceleration.x": "1.7709157991409303",
"accelerometer_linear_acceleration.y": "0.5227935215458274",
"accelerometer_linear_acceleration.z": "9.483151170015336",
}
},
"categories": [
{
"id": 0,
"name": "counter"
},
{
"id": 1,
"name": "pillar"
},
{
"id": 2,
"name": "desk"
},
{
"id": 3,
"name": "ticket machine"
},
{
"id": 4,
"name": "fire extinguisher"
},
{
"id": 5,
"name": "wastebasket"
},
{
"id": 6,
"name": "information board"
},
{
"id": 7,
"name": "chair"
},
{
"id": 8,
"name": "car"
},
{
"id": 9,
"name": "sculpture"
},
{
"id": 10,
"name": "display stand"
},
{
"id": 11,
"name": "table"
},
{
"id": 12,
"name": "fence"
},
{
"id": 13,
"name": "sign"
},
{
"id": 14,
"name": "person"
}
],
"images": [
{
"id": 10,
"width": 1920,
"height": 1080,
"file_name": "0011.jpg",
"scenario": {
"id": "SN07",
"name : " ",
"start_time": "08:50:11",
"end_time": "08:53:34",
"distance_traveled": 54",
"len": 62,
"index": 10,
"out_of_focus": false
}
}
],
"annotations": [
{
"id": "1101",
"image_id": "10",
"category_id": 14,
"bbox": [
898.61,
44.13,
1360.55,
886.36
],
"attributes": {
"is_social_interaction": false
}
}
],
"pcd_images": [
{
"id": "10",
"file_name": "0011.pcd",
"date_capture": "2023-09-20 17:07:46.572397+09:00"
}
],
"pcd_annotations": [
{
"obj_id": 1101,
"type": "cuboid",
"obj_type": "person",
"psr": {
"scale": {
"x": 0.5173366848600033,
"y": 0.6694160168796929,
"z": 1.1747675991099225
},
"position": {
"x": 2.1646981813102655,
"y": -0.17196524771686375,
"z": 0.06853672100140891
},
"rotation": {
"x": 0,
"y": 0,
"z": 2.4870941840919194
}
}
}
]
}
-
데이터셋 구축 담당자
수행기관(주관) : 흥일기업(주)
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 김종백 02-6283-0157 jbkim@hungil.co.kr 사업 관리 및 데이터 수집 수행기관(참여)
수행기관(참여) 기관명 담당업무 한국자동차연구원 데이터 정제 ㈜테스트웍스 데이터 가공 / 검수 한밭대학교 산학협력단 데이터 학습 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 김종백 02-6283-0165 jbkim@hungil.co.kr 박준영 02-6283-0157 jypark@hungil.co.kr AI모델 관련 문의처
AI모델 관련 문의처 담당자명 전화번호 이메일 최동걸 042-821-1213 dgchoi@hanbat.ac.kr 이상우 042-825-1959 sangwoo.lee@edu.hanbat.ac.kr 저작도구 관련 문의처
저작도구 관련 문의처 담당자명 전화번호 이메일 조한진 02-423-5178 jhj@testworks.co.kr 유동헌 02-423-5178 bertas41@testworks.co.kr
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.