-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.0 2022-07-28 데이터 최초 개방 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2022-10-21 신규 샘플데이터 개방 2022-07-28 콘텐츠 최초 등록 소개
도심부 지능형 신호관제 및 교통정보 고도화를 위한 4 x 4개의 연속적인 교차로 도로망의 신호체계와 연동된 5종의 데이터 (통과차량, 보행량, 도로차량, 바운딩박스, 큐보이드)
구축목적
도심부 지능형 신호관제 및 교통정보 고도화를 위한 연속된 교차로를 통행하는 방향별 차량 데이터 구축
-
메타데이터 구조표 데이터 영역 교통물류 데이터 유형 이미지 데이터 형식 jpg, txt 데이터 출처 교통 CCTV 영상 라벨링 유형 바운딩박스(이미지/동영상)/키포인트(이미지/동영상) 라벨링 형식 JSON, CSV 데이터 활용 서비스 스마트교차로 사업, 스마트시티 사업, 자율주행 국가전략 프로젝트 등 데이터 구축년도/
데이터 구축량2021년/총 이미지 276,749장 -
데이터 구축 규모
1. 정제 이미지 데이터 구축
- 부천시(교차로, 중간도로), 악천후, 다양한 시간대의 75,250영상(약 217,660분)에서 276,749장의 정제 이미지 데이터를 구축함 (개인정보 비식별화 적용)
구분 구분 구축 데이터량 원천데이터 (mp4) 구축데이터 (jpg) 부천시 교차로 36,549개 146,212장 중간도로 21,530개 86,120장 악천후 영상 7,051개 21,153장 다양한 시간대 10,120개 23,264장 합계 75,250개 276,749장 2. 정형 데이터(통과차량/보행량)
- 교차로 영상 36,549개에 대한 교차로 통과차량 및 횡단보도 보행량 데이터 구축
데이터셋 구축 데이터량 구축 데이터 용량 원천데이터 (mp4) 구축데이터 (csv) 객체수량 원천데이터 구축데이터 (영상시간) 통과차량 데이터 36,549개 36,549개 1,645,371개 1,530GB 0.115GB (103,715분) 보행량 데이터 36,549개 36,549개 285,536개 1,530GB 0.026GB (103,715분) 3. 도로차량(포인트/폴리라인), 바운딩박스, 큐보이드 데이터
- 정제한 이미지 데이터 중에 유의미한 이미지를 대상으로 가공한 데이터셋 구축
데이터셋 구축 데이터량 구축 데이터 용량 원천데이터 (mp4) 구축데이터 (xml) 원천데이터 구축데이터 도로차량 데이터 159,457장 148,553장 88.29GB 0.327GB 바운딩박스 데이터 117,376장 111,352장 67.01GB 0.148GB 큐보이드 데이터 117,926장 103,606장 67.01GB 0.650GB 1. 클래스별 라벨 분포
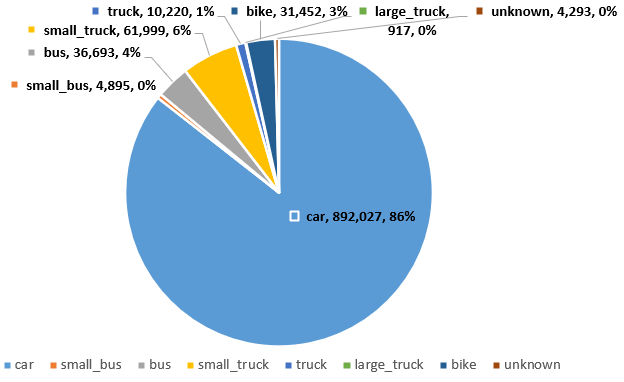
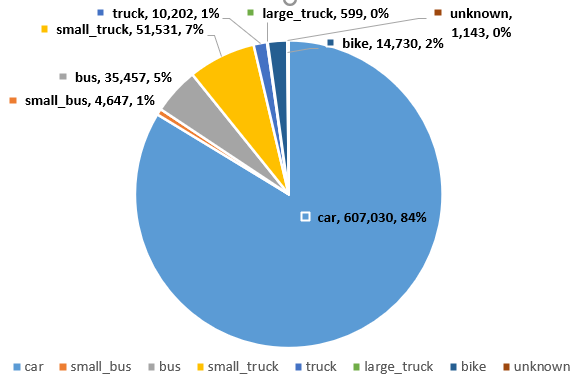
- 통상적인 교통량 통계의 차종분류는 car,bus,truck을 대상으로 하고, 여기에 이륜차를 추가하여7종으로 분류 (※ unknown : 멀어서 작게보이거나 겹쳐서 모호한 경우 또는 차종분류에 포함되지 않는 특수차량 (예, 포크레인 등)
데이터셋 클래스 수량 비율 차트 도로차량 car 1,259,940 84.10% bus small_bus 8,781 0.60% bus 46,765 3.10% truck small_truck 92,500 6.20% truck 15,446 1.00% large_truck 2,931 0.20% bike 41,916 2.80% unknown 29,393 2.00% 합계 1,497,672 100.00% 바운딩박스 car 892,027 85.60% bus small_bus 4,895 0.50% bus 36,693 3.50% truck small_truck 61,999 5.90% truck 10,220 1.00% large_truck 917 0.10% bike 31,452 3.00% unknown 4,293 0.40% 합계 1,042,496 100.00% 큐보이드 car 607,030 83.70% bus small_bus 4,647 0.60% bus 35,457 4.90% truck small_truck 51,531 7.10% truck 10,202 1.40% large_truck 599 0.10% bike 14,730 2.00% unknown 1,143 0.20% 합계 725,339 100.00% 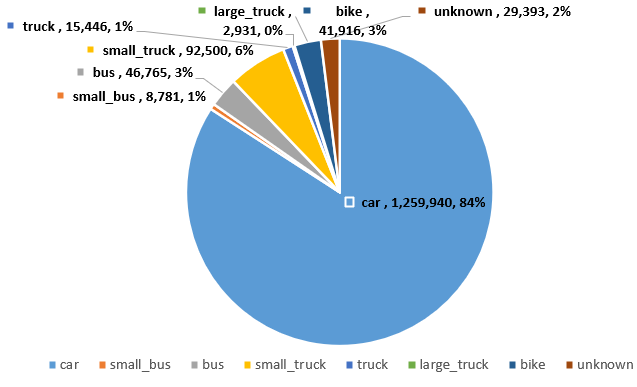
2. 시간 분포(첨두시간별)
- 교통분야 시간대는 통상적인 오전첨두, 비첨두, 오후첨두로 나뉜다. 교통문제는 주로 첨두시간에 발생하여 이 시간대에 구축량을 늘리는 것이 좋다는 학계 및 연구기관의 조언으로 이를 반영함
데이터셋 오전첨두(06:20~09:40) 비첨두(13:50~16:10) 오후첨두(17:20~20:40) 도로차량 데이터 46,773장 34,383장 49,881장 바운딩박스 데이터 28,233장 26,290장 28,119장 큐보이드 데이터 25,860장 24,322장 25,168장 3. 시간 분포(시간대별)
- 시간대를 10개의 구간으로 나누고 각 시간대에서 2,000개의 이미지를 선정하여 바운딩박스와 큐보이드 데이터를 가공하여 시간대의 다양성을 확보함
데이터셋 07:30~08:59 9:00 10:00 11:00 12:00 바운딩박스 데이터큐보이드 데이터 3,474장 2,209장 2,093장 2,092장 2,027장 13:00 14:00 15:00 16:00 17:00~18:30 2,034장 2,050장 2,046장 2,017장 3,122장 4. 날씨 분포(악천후)
- 인공지능 학습에 다양한 날씨의 포함이 중요하여 영상 20,000분를 수집하고 10,000개의 이미지를 선별하여 바운딩박스와 큐보이드 데이터로 가공함
구분 가공 이미지 바운딩박스 데이터 10,200장 큐보이드 데이터 10,067장 -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드활용 모델
차량인식 바운딩박스 모델
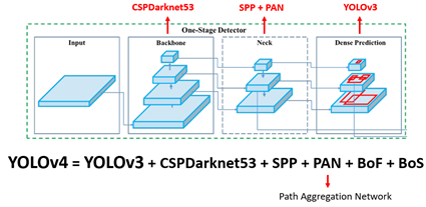
차량 바운딩박스 모델은 실시간 교통흐름(교통량, 속도), 돌발상황 및 교통정보 고도화 등의 교통분야에 필수적이다. 또한, 스마트 교차로, 스마트 시티, 자율주행 등의 국가전략 프로젝트에 활용된다. 기술이 발달하면서 또한 실 사용 측면에서 지속적인 모델의 개선이 요구되고 있는 실정이다. 이에, 본 과제에서는 기존의 데이터셋보다 정교한 데이터를 구축하였으며 이를 바탕으로 모델의 정확도를 개선하였다.- [참조 학습 모델] YOLOv4. 여러 객체 검출 모델 중에서 정확도(mAP)와 속도(FPS) 측면을 모두 고려하여 YOLOv4를 최종 모델로 선정
- [학습 데이터] 총 7만장으로 데이테셋을 구성하였고 그 중에서 40% 정도를 다양성 확보를 위한 악천후 및 시간대별 이미지로 선정함. 학습, 검증 및 테스트 데이터셋을 각각 8:1:1의 비율로 구성하여 학습을 진행함.
- [모델 성능 검증결과] mAP 90.9%
2D 인식부 성능지표 목표 달성결과 mAP 80% 이상 90.90% 차량인식 큐보이드 모델
차량의 높이, 방향 등의 고도화된 정보의 추출위한 차량 큐보이드 추출 딥러닝 모델을 자체 개발함
- [전체 구조] 차량 큐보이드 인식 모델은 기존의 2D 바운딩 박스를 인식하는 2D인식부, 각 카메라 설치 파라미터 (지역, 각도 등)로부터 도로기하정보(Geometry)를 추출하는 도로기하정보추출부로 구성되어 있으며, 2D인식부 및 도로기하정보추출부로부터 획득한 정보를 조합하여 차량의 큐보이드 형태를 생성함
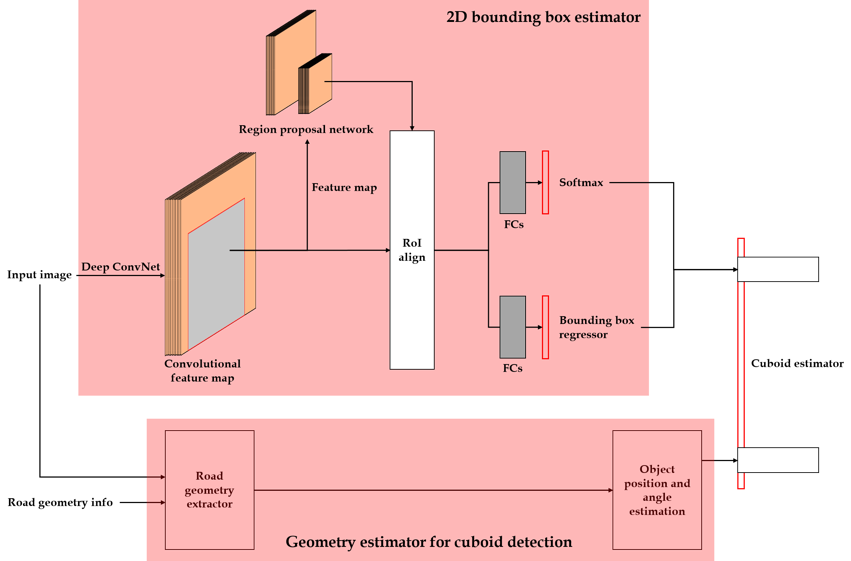
2D 인식부 이미지 내 차량의 2D 바운딩박스를 인식하는 것으로 Detectron2 플랫폼 내 Faster R-CNN 모델을 활용함 도로기하정보 추출부 카메라 설치 위치에 따른 도로기하정보 파라미터를 자동으로 추출함.
추출하는 정보에는 차량의 방향, 차량의 중심좌표와 큐보이드를 구성하는 각 점의 각도, 해당 도로에서 차량의 크기 등- [학습 데이터] 총 7.6만장으로 데이테셋을 구성하였고 그 중에서 20% 정도를 다양성 확보를 위한 악천후 및 시간대별 이미지로 선정함. 학습, 검증 및 테스트 데이터셋을 각각 7.2:1.6:1.2의 비율로 구성하여 학습을 진행함.
- [모델 성능 검증결과] 부피 mIoU 84.9%
※ 부피 mIoU : 큐보이드 각 면 (6면)의 mIoU의 평균 산출을 통한 큐보이드 인식 정확도 산정
성능지표 목표 달성결과 부피 mIoU 80% 이상 84.90% 활용 서비스
교통영상분석
지능형 교통관제서비스에서 교통정보의 분석이 요구되는데, 차량인식 모델은 교통 CCTV로부터 수집되는 영상에서 기본적인 교통정보를 추출한다.
- 도로의 교통량 분석 (접근로별/교차로별/대기길이/정지차량 등)
- 차종 분류 (승용차, 버스, 트럭, 오토바이, 보행자 등)
- 돌발상황 판단 (역주행 및 정지 차량, 보행자 검지 등)

자율주행
구축된 데이터셋은 자율주행 차량 관련 강화학습의 학습용 데이터로 활용될 수 있다.- CCTV 뷰 학습 데이터를 자율주행 데이터셋으로 활용
- 자율주행차량 경로기반 속도 추천 서비스 : 자율협력주행차량에게 차량의 속도 제어에 필요한 추천속도의 제공을 통하여 차량의 에너지 효율을 향상시킴

-
데이터 성능 점수
측정값 (%)기준값 (%)데이터 성능 지표
데이터 성능 지표 번호 측정항목 AI TASK 학습모델 지표명 기준값 점수 측정값 점수 1 바운딩박스 객체 인식(차량) Object Detection YOLO v4 mAP 80 % 90.94 % 2 큐보이드 객체인식 Object Detection Mask R-CNN(Detectron2) mIoU 80 % 85.1 %
※ 데이터 성능 지표가 여러 개일 경우 각 항목을 클릭하면 해당 지표의 값이 그래프에 표기됩니다.
※ AI모델 평가 지표에 따라 측정값의 범위, 판단 기준이 달라질 수 있습니다. (ex. 오류율의 경우, 낮을수록 좋은 성능을 내는 것으로 평가됩니다)
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드데이터 포맷
1. 통과차량 데이터
- 정의 : 교차로 접근로 방향의 기준선을 통과하는 개별차량의 통과정보(통과시간, 차종, 차로, 차량방향 등)를 가공
- 원천 데이터 : 영상(mp4)
- 라벨링 데이터 : 정형(csv)
예시(영상) 예시(영상) 데이터 항목 라벨링 데이터(csv 파일 형식) 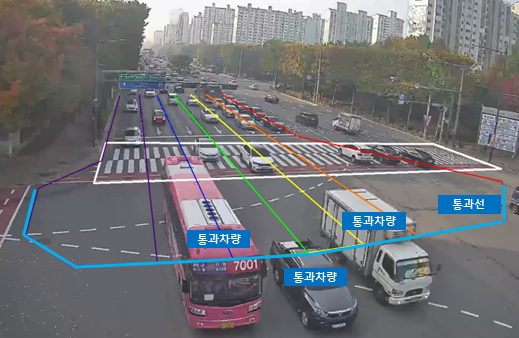
신호정보
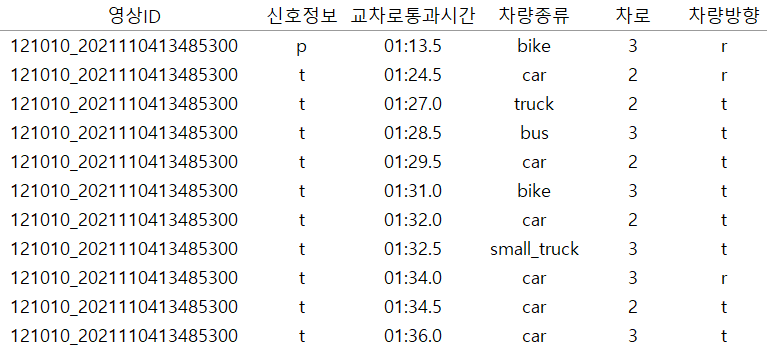
교차로
통과시간 차량종류 차로 차량방향 2. 보행량 데이터
- 정의 : 횡단보도 양방향 보행량 가공
- 원천 데이터 : 영상(mp4)
- 라벨링 데이터 : 정형(csv)
예시(영상) 데이터 항목 라벨링 데이터(csv 파일 형식) 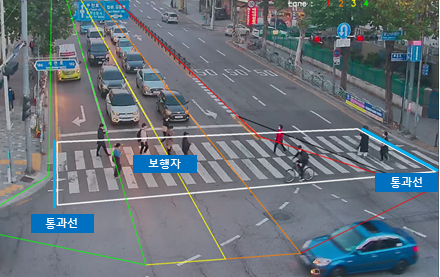
보행자 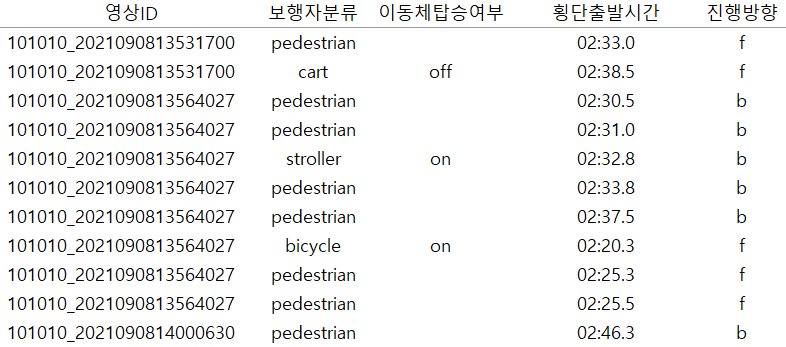
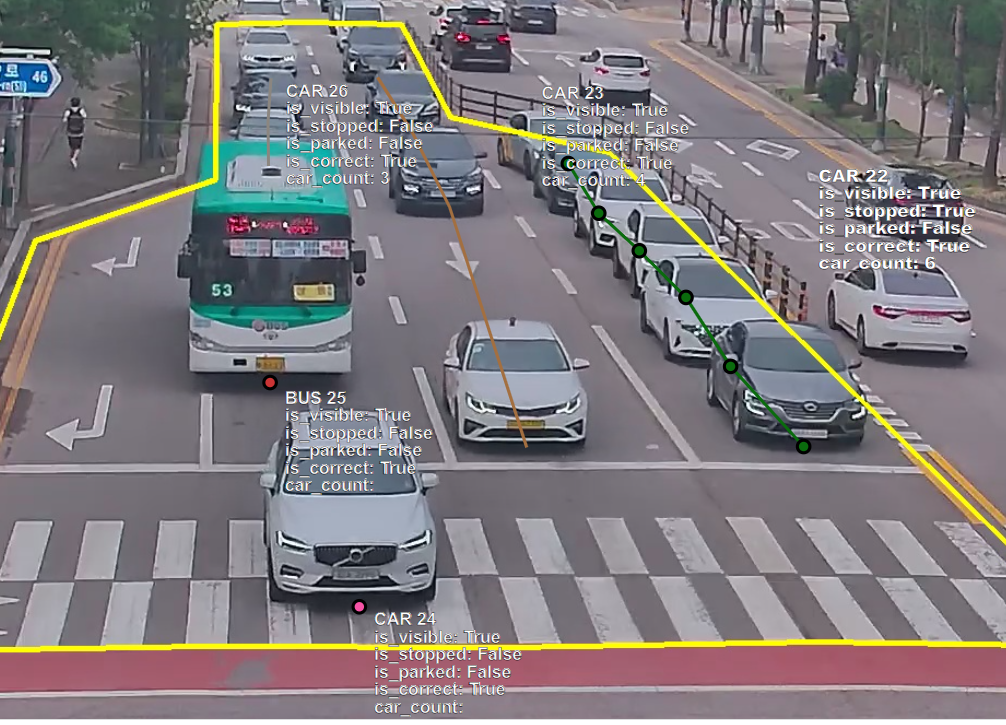
분류 이동체 탑승 여부 횡단출발 시간 진행방향 3. 도로차량 데이터(포인트/폴리라인)
- - 정의 : 이미지 원천 데이터의 표시된 영역(카메라 영역)내에 존재하는 차량에 대해 위치(점, 선분, 폴리라인), 차종, 주행여부, 주차여부, 주정여부, 가려짐여부, 동일차량의 대수 등 포인트/폴리라인 가공
- - 원천 데이터 : 이미지(jpg)
- - 라벨링 데이터 : 비정형(xml)
예시(이미지) 데이터 항목 라벨링 데이터(xml 파일 형식) - 원천 이미지

폴리라인/
포인트
객체정보
- 객체클래스
- x,y 좌표
- 속성정보
(is_visible
is_stopped
is_parked
is_correct
car_count)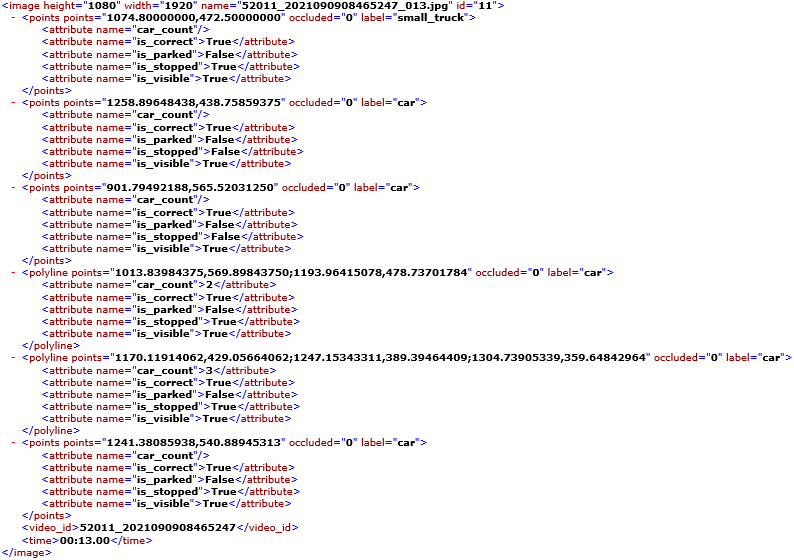
- 라벨링 이미지
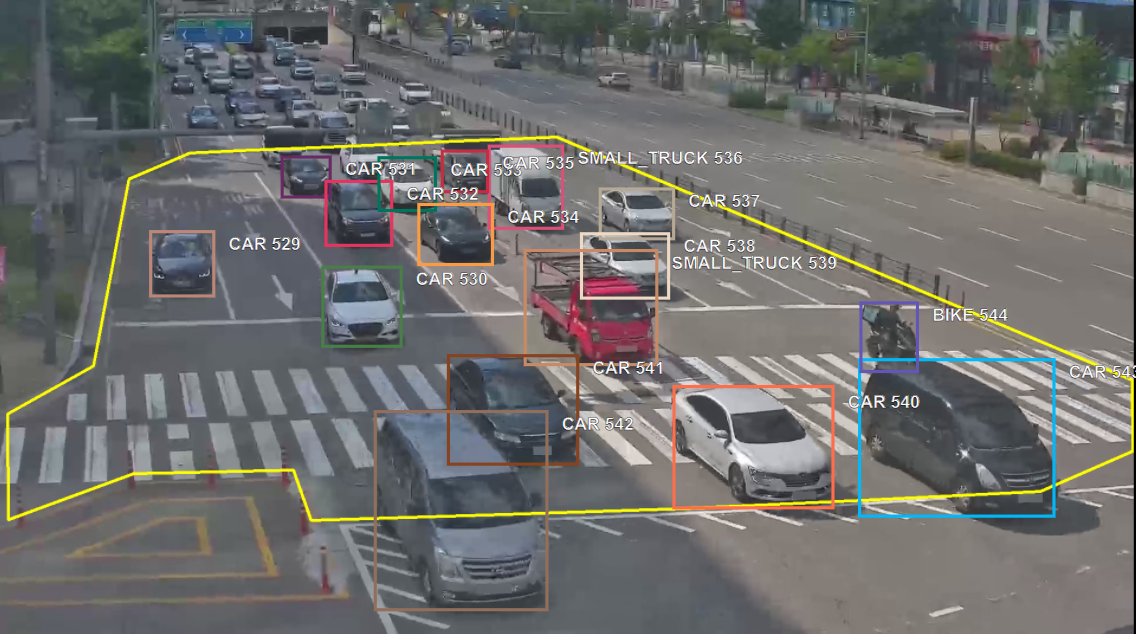
4. 바운딩박스 데이터
- 정의 : 이미지 원천 데이터의 표시된 영역(카메라 영역)내에 존재하는 개별차량에 대해 바운딩박스 가공
- 원천 데이터 : 이미지(.jpg)
- 라벨링 데이터 : 비정형(.xml)
예시(이미지) 데이터 항목 라벨링 데이터(xml 파일 형식) 원천 이미지

객체클래스
객체 x,y
좌표
- 좌측상단 x
- 좌측상단 y
- 우측하단 x
- 우측하단 y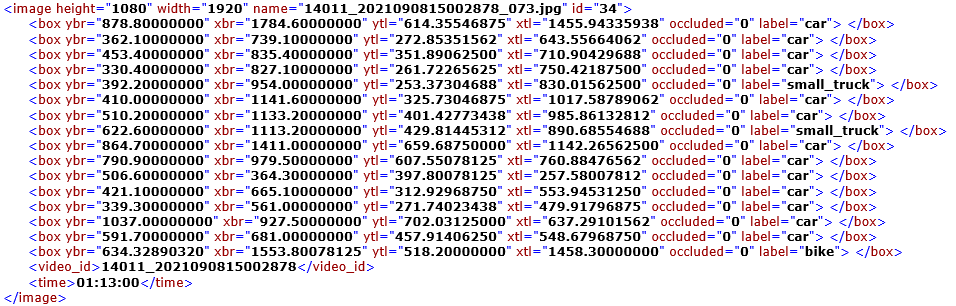
라벨링 이미지
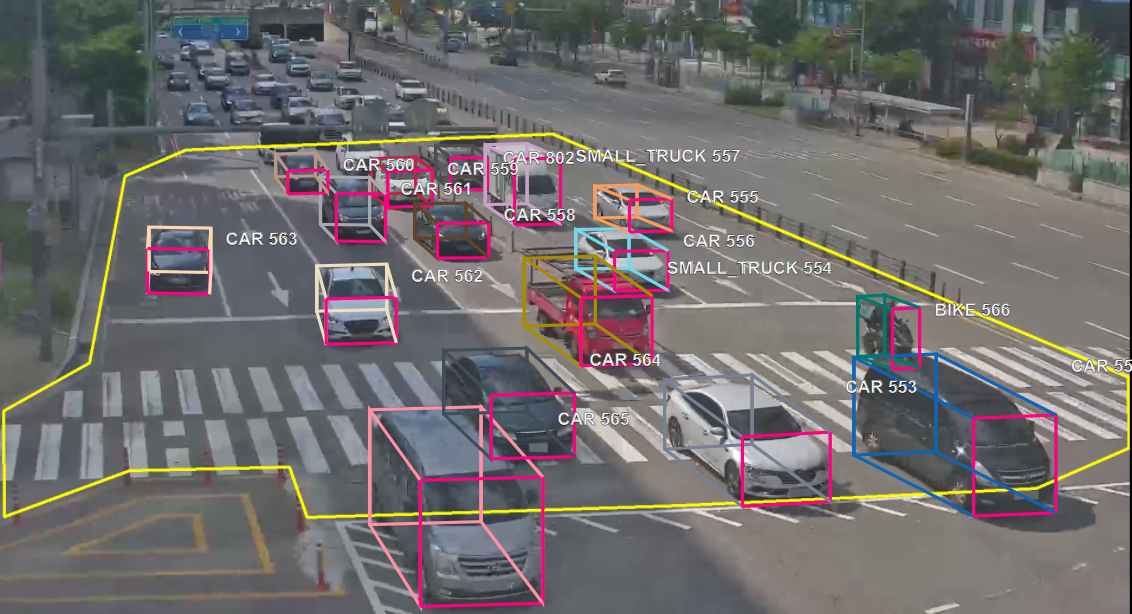
5. 큐보이드 데이터
- 정의 : 이미지 원천 데이터의 표시된 영역(카메라 영역)내에 존재하는 개별차량에 대해 큐보이드 가공
- 원천 데이터 : 이미지(.jpg)
- 라벨링 데이터 : 비정형(.xml)
예시(이미지) 데이터 항목 라벨링 데이터(xml 파일 형식) 원천 이미지

객체클래스
객체 x,y
좌표(앞쪽)
- 좌측상단 x,y
- 좌측하단 x,y
- 우측상단 x,y
- 우측하단 x,y
객체 x,y
좌표(뒤쪽)
- 좌측상단 x,y
- 좌측하단 x,y
- 우측상단 x,y
- 우측하단 x,y
객체 x,y,z
3D 좌표
- 8개 꼭지점 x,y,z
라벨링 이미지
어노테이션포맷
1. 통과차량 데이터(csv)
No 항목명 항목설명 타입 필수 범위 여부 1 video_file 파일 경로 및 이름 String Y 논리카메라[5~6자릿수]_YYYYMMDDhhmmssms.mp4 2 video_id 동영상 파일의 식별값 String Y 논리카메라[5~6자릿수]_YYYYMMDDhhmmssms 3 signal_info.movement 통과시간의 신호정보 String Y t:직진, l:좌회전,tl:직진/좌회전 동시, y:노란, p:보행자,s:정지(빨간) 4 departure_time 영상기준 차량의 교차로 통과 시간 String Y mm:ss.ms(분:초.밀리초) 5 car_type 교차로 통과 차량의 종류 String Y [car, small_bus, bus, small_truck, truck, large_truck, bike, unknown] 6 lane 차량이 지나가는 차로 String Y [1~10] 7 car_info.movement 차량의 진행 방향 String Y r:우회전, t:직진, l:좌회전, u:유턴 2. 보행량 데이터(csv)
구분 항목명 항목설명 타입 필수여부 범위 1 video_file 파일 경로 및 이름 String Y 논리카메라[5~6자릿수]_YYYYMMDDhhmmssms.mp4 2 video_id 동영상 파일의 식별값 String Y 논리카메라[5~6자릿수]_YYYYMMDDhhmmssms 3 pedestrian_info.
pedestrian_type보행자 분류 pedestrian_info.
AttributeY pedestrian:보행자, elderly:노약자, baby:아기, wheelchair:휠체어,
stroller:유모차, cart:손수레.
board:보드, bicycle:자전거,
mobility:모빌리티, unknown4 pedestrian_info.
Attribute보행자의 이동체 탑승 여부 String Y on:탑승, off:탑승하지 않음,
null:탈것이 아님5 pedestrian_info.TOD 영상기준 보행자 도로 횡단 출발 시간 String Y mm:ss.ms(분:초.밀리초) 8 pedestrian_info.
Direction보행자 진행 방향 String Y f:forward, b:backward 3. 도로차량 데이터(xml)
구분 항목명 항목설명 타입 필수여부 범위 1 name 작업단위(Task)명 String 2 size 가공 이미지의 개수 number Y [1~100] 3 labels.labels.name 객체 class 정의 부분 String Y 4 image 이미지 정보 Object Y 4–1 image.id 이미지 고유 식별 숫자 (0번 ~ (size-1)번) number Y [0~100] 4–2 image.name 이미지 파일명 String Y 논리카메라[5~6자릿수]_YYYMMDDhhmmssms_sss.jpg
(sss: 영상기준 이미지 추출시각)4–3 image.width 이미지 가로 해상도 String Y [0~1920] 4–4 image.height 이미지 세로 해상도 String Y [0~1080] 5 points 포인트 객체 정보 Object 5–1 points.label 가공 객체의 class 정보 String [car, small_bus, bus, small_truck, truck, large_truck, bike, unknown] 5–2 points.points 가공 객체의 이미지 내 x,y 형태 좌표 String [0~1920],[0~1080] <예: points.point
="940.00000000,815.10000000">6 polyline 폴리라인 객체 정보 Object 6–1 polyline.label 가공 객체들 class 정보 String [car, small_bus, bus, small_truck, truck, large_truck, bike, unknown] 6–2 polyline.points 가공 객체들의 이미지 내 x,y;x,y;.. 형태의 좌표 String [0~1920],[0~1080]:[0~1920],[0~1080];... <예: polyline.points
="515.42382812,464.84570312;523.60000000,404.80000000;..>7 video_id 논리적 구분한 동영상 파일의 식별값 String Y 논리카메라[5~6자릿수]_YYYYMMDDhhmmssms 8 time 영상기준 이미지 추출시각 String Y mm:ss.ms(분:초:밀리초) 9 attribute.name 가공된 객체 class 하위에 실제로 입력된 세부 속성 값 string is_visible: true/false, is_stopped: true/false
is_parked: true/false, is_correct: true/false
car_conunt: (integer)
(car_count는 폴리라인에서만 정수로 존재함)4. 바운딩박스(xml)
구분 항목명 항목설명 타입 필수여부 범위 1 name 작업단위(Task)명 String 2 size 가공 이미지의 개수 number Y [1~100] 3 labels.labels.name 객체 class 정의 부분 String Y 4 image 이미지 정보 Object Y 4–1 image.id 이미지 고유 식별 숫자 (0번 ~ (size-1)번) String Y [0~100] 4–2 image.name 이미지 파일명 String Y 논리카메라[5~6자릿수]_YYYMMDDhhmmssms_sss.jpg
(sss: 영상기준 이미지 추출시각)4–3 image.width 이미지 파일 가로 해상도 String Y [0~1920] 4–4 image.height 이미지 파일 세로 해상도 String Y [0~1080] 5 box 바운딩박스 객체 정보 Object 5–1 box.label 가공 객체의 class 정보 String [car, small_bus, bus, small_truck, truck, large_truck, bike, unknown] 5–2 box.xtl 가공 객체의
좌측 상단 x좌표String [0~1920]
<예: xtl="749.79687500">5–3 box.ytl 가공 객체의
좌측 상단 y좌표String [0~1080]
<예: ytl="363.30468750">5–4 box.xbr 가공 객체의
우측 하단 x좌표String [0~1920] 5–5 box.ybr 가공 객체의
우측 하단 y좌표String [0~1080] 6 video_id 논리적 구분한 동영상 파일의 식별값 String Y 논리카메라[5~6자릿수]_YYYYMMDDhhmmssms 7 time 영상기준 이미지 추출시각 String Y mm:ss.ms(분:초:밀리초) 5. 큐보이드(xml)
구분 항목명 항목설명 타입 필수여부 범위 1 name 작업단위(Task)명 String 2 size 가공 이미지의 개수 number Y [1~100] 3 labels.labels.name 객체 class 정의 부분 String Y 4 image 이미지 정보 Object Y 4–1 image.id 이미지 고유 식별 숫자 (0번 ~ (size-1)번) String Y [0~100] 4–2 image.name 이미지 파일명 String Y 논리카메라[5~6자릿수]_YYYMMDDhhmmssms_sss.jpg
(sss: 영상기준 이미지 추출시각)4–3 image.width 이미지 파일 가로 해상도 String Y [0~1920] 4–4 image.height 이미지 파일 세로 해상도 String Y [0~1080] 5 cuboid 큐보이드 객체 정보 Object 5–1 cuboid.label 가공 객체의 class 정보 String [car, small_bus, bus, small_truck, truck, large_truck, bike, unknown] 5–2 cuboid.xtl1 가공 객체의 앞쪽
좌측 상단 2D x좌표String [–200~2120]
<예: xtl1="347.61">5–3 cuboid.ytl1 가공 객체의 앞쪽
좌측 상단 2D y좌표String [–200~1280]
<예: ytl1="569.31">5–4 cuboid.xbl1 가공 객체의 앞쪽
좌측 하단 2D x좌표String [–200~2120] 5–5 cuboid.ybl1 가공 객체의 앞쪽
좌측 하단 2D y좌표String [–200~1280] 5–6 cuboid.xtr1 가공 객체의 앞쪽
우측 상단 2D x좌표String [–200~2120] 5–7 cuboid.ytr1 가공 객체의 앞쪽
우측 상단 2D y좌표String [–200~1280] 5–8 cuboid.xbr1 가공 객체의 앞쪽
우측 하단 2D x좌표String [–200~2120] 5–9 cuboid.ybr1 가공 객체의 앞쪽
우측 하단 2D y좌표String [–200~1280] 5–10 cuboid.xtl2 가공 객체의 뒤쪽
좌측 상단 2D x좌표String [–200~2120] 5–11 cuboid.ytl2 가공 객체의 뒤쪽
좌측 상단 2D y좌표String [–200~1280] 5–12 cuboid.xbl2 가공 객체의 뒤쪽
좌측 하단 2D x좌표String [–200~2120] 5–13 cuboid.ybl2 가공 객체의 뒤쪽
좌측 하단 2D y좌표String [–200~1280] 5–14 cuboid.xtr2 가공 객체의 뒤쪽
우측 상단 2D x좌표String [–200~2120] 5–15 cuboid.ytr2 가공 객체의 뒤쪽
우측 상단 2D y좌표String [–200~1280] 5–16 cuboid.xbr2 가공 객체의 뒤쪽
우측 하단 2D x좌표String [–200~2120] 5–17 cuboid.ybr2 가공 객체의 뒤쪽
우측 하단 2D y좌표String [–200~1280] 6 attribute.point_3d cuboid 데이터의 3D 좌표 데이터 String 6–1 attribute.point_3d.m_xtl1 cuboid 데이터의 3D x좌표 값 String [-100, 100]
<예; m_xtl1x=“13.421542561235”>6–2 attribute.point_3d.m_ytl1 cuboid 데이터의 3D y좌표 값 String [-100, 100] 6–3 attribute.point_3d.m_ztl1 cuboid 데이터의 3D z좌표 값 String [-100, 100] 6–4 attribute.point_3d.m_xbl1 cuboid 데이터의 3D x좌표 값 String [-100, 100] 6–5 attribute.point_3d.m_ybl1 cuboid 데이터의 3D y좌표 값 String [-100, 100] 6–6 attribute.point_3d.m_zbl1 cuboid 데이터의 3D z좌표 값 String [-100, 100] 6–7 attribute.point_3d.m_xtr1 cuboid 데이터의 3D x좌표 값 String [-100, 100] 6–8 attribute.point_3d.m_ytr1 cuboid 데이터의 3D y좌표 값 String [-100, 100] 6–9 attribute.point_3d.m_ztr1 cuboid 데이터의 3D z좌표 값 String [-100, 100] 6–10 attribute.point_3d.m_xbr1 cuboid 데이터의 3D x좌표 값 String [-100, 100] 6–11 attribute.point_3d.m_ybr1 cuboid 데이터의 3D y좌표 값 String [-100, 100] 6–12 attribute.point_3d.m_zbr1 cuboid 데이터의 3D z좌표 값 String [-100, 100] 6–13 attribute.point_3d.m_xtl2 cuboid 데이터의 3D x좌표 값 String [-100, 100] 6–14 attribute.point_3d.m_ytl2 cuboid 데이터의 3D y좌표 값 String [-100, 100] 6–15 attribute.point_3d.m_ztl2 cuboid 데이터의 3D z좌표 값 String [-100, 100] 6–16 attribute.point_3d.m_xbl2 cuboid 데이터의 3D x좌표 값 String [-100, 100] 6–17 attribute.point_3d.m_ybl2 cuboid 데이터의 3D y좌표 값 String [-100, 100] 6–18 attribute.point_3d.m_zbl2 cuboid 데이터의 3D z좌표 값 String [-100, 100] 6–19 attribute.point_3d.m_xtr2 cuboid 데이터의 3D x좌표 값 String [-100, 100] 6–20 attribute.point_3d.m_ytr2 cuboid 데이터의 3D y좌표 값 String [-100, 100] 6–21 attribute.point_3d.m_ztr2 cuboid 데이터의 3D z좌표 값 String [-100, 100] 6–22 attribute.point_3d.m_xbr2 cuboid 데이터의 3D x좌표 값 String [-100, 100] 6–23 attribute.point_3d.m_ybr2 cuboid 데이터의 3D y좌표 값 String [-100, 100] 6–24 attribute.point_3d.m_zbr2 cuboid 데이터의 3D z좌표 값 String [-100, 100] 7 video_id 논리적 구분한 동영상 파일의 식별값 String Y 논리카메라[5~6자릿수]_YYYYMMDDhhmmssms 8 time 영상기준 이미지 추출시각 String Y mm:ss.ms(분:초:밀리초) -
데이터셋 구축 담당자
수행기관(주관) : 라온피플 주식회사
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 한지영 070-8895-8124 hjy@laonpeople.com 카메라 설치, 차량인식 바운딩박스 모델 개발, 스마트 교차로 관제 서비스 개발 및 데이터 품질관리 수행기관(참여)
수행기관(참여) 기관명 담당업무 아토리서치(주) 원천영상, 신호정보, BIS정보, 메타정보 수집 및 정제 주식회사 테스트웍스 이미지 정제, 비식별화, 데이터 가공 및 검수 한국교통연구원 자율주행차량 경로 기반 속도 추천 서비스 한국과학기술원 차량인식 큐보이드 모델 개발 및 관련 도구 개발
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.