인도보행 영상
- 분야교통물류
- 유형 이미지
-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.1 2021-03-31 데이터 보완 개인정보 비식별화 개방 1.0 2019-12-31 데이터 개방 데이터 최초 개방 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2026-05-06 기타 태그 추가 소개
인도 보행에 장애가 되는 객체 29종에 대해 박스, 폴리곤 형태로 어노테이션한 데이터 및 인도 노면 상태 정보를 폴리곤 형태로 어노테이션한 데이터를 구축한 영상 데이터 제공
- 데이터 영역 : 교통물류
- 데이터 유형 : 이미지
- 구축년도 : 2019년
- 구축량 : 67만
구축목적
장애인 이동권 신장 - 인공지능의 도움으로 장애인 보행에 위협요소인 각종 장애물(자동차, 사람, 가로수, 가로등 등)과 파손 등으로 위험한 보행 노면을 피해 보다 안전하고 원활한 장애인 이동권 보장 인도보행 인공지능 분야 공개데이터 셋의 부족 - 국내 인도보행영상 데이터셋 구축 사례 전무한 상태에서 국내 환경 맞춤형 데이터셋 구축 필요 자율주행 분야에서 차도뿐 아니라 생활도로, 인도 등의 국내 다양한 도로형태에서의 데이터 셋 구축
-
구축내용
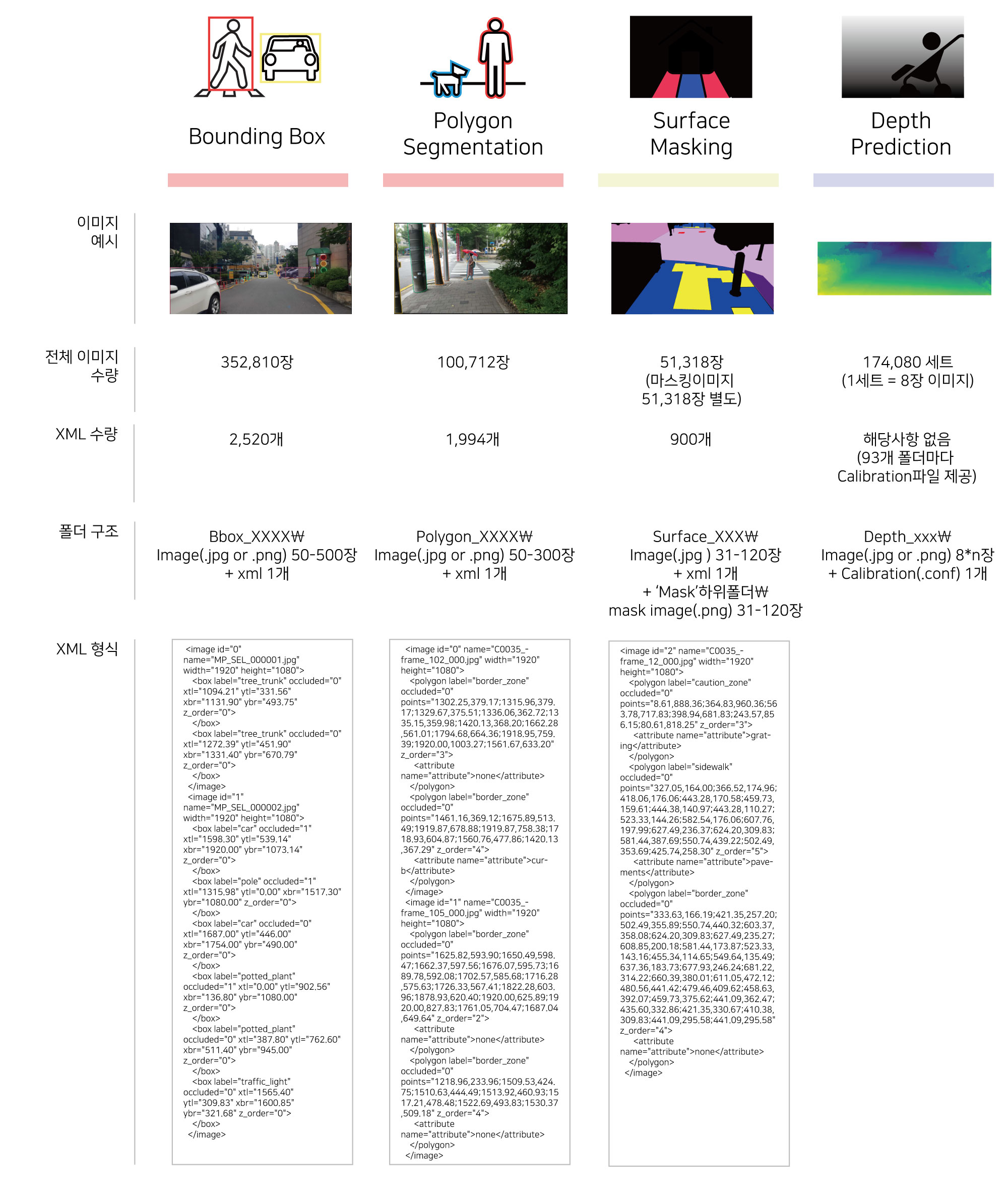
- Bounding Box/Polygon Segmentation 데이터셋 : 인도보행시 충돌위험이 존재하는 이동체와 고정체를 분석하여 29종 장애물 객체로 정의하고 어노테이션함
상식 데이터 구축내용 표 (구축년도,데이터종류,포함내용,제공방식) 대분류 소분류 라벨명(뜻) 장애물 이동체 bicycle(자전거)
bus(버스)
car(승용차, 승합차)
carrier(리어카, 손수레)
cat(고양이)
dog(개)
motorcycle(오토바이, 스쿠터)
movable_signage(이동식 홍보 전시물/안내판)
person(사람)
scooter(변속 기어가 없는 이륜차, 두 발로 탈수 있는 기구)
stroller(유모차)
truck(트럭)
wheelchair(휠체어)고정체 barricade(바리케이드)
bench(벤치)
bollard(볼라드)
chair(1인 의자)
fire_hydrant(소화전)
kiosk(한쪽이 열리는 작은 점포/ATM기기 등 독립된 단말기)
parking_meter(주차요금정산기)
pole(대/기둥)
potted_plant(화분)
power_controller(전력제어함)
stop(버스/택시 정류장)
table(탁자)
traffic_light(신호등)
traffic_light_controller(신호등제어기)
traffic_sign(교통표지판)
tree_trunk(가로수 기둥)- Surface Masking 데이터셋 : 노면의 안전성 부족으로 인한 위험유발가능성을 고려하여 노면 특성(재질, 특수성, 파손여부 등)에 따라 20종 노면 객체 및 속성을 정의하고 어노테이션 및 마스킹 처리함
상식 데이터 구축내용 표 (구축년도,데이터종류,포함내용,제공방식) 대분류 소분류 라벨명(뜻) 노면 alley
(사람과 차가 함께 다닐 수 있는 길)
crosswalk (횡단보도)
damaged (파손)
normal (일반)
speed_dump (과속방지턱)bike_lane
(자전거도로)(속성값 없음) braille_guide_blocks (점자블록) damaged (파손)
normal (일반)caution_zone
(주의구역)grating (그레이팅)
manhole (맨홀)
repair_zone (보수구역)
stairs (계단)
tree_zone (가로수영역)roadway
(차만 다닐 수 있는 길)crosswalk (횡단보도)
normal (일반)sidewalk
(인도)asphalt (아스팔트)
blocks (보도블럭)
cement (시멘트)
damaged (파손)
other (기타)
soil_stone (흙/돌)
urethane (우레탄)- Depth Prediction 데이터셋 : 하나의 Depth Prediction 데이터셋에 해당하는 8개의 파일은 아래와 같음
상식 데이터 구축내용 표 (구축년도,데이터종류,포함내용,제공방식) 파일명 내용 Disparity16 GA-net을 통해 추출되는, disparity의 data(좌우 이미지에서 대응점의 x축 상 pixel 차이, 거리감을 나타내는 data)가 저장된 파일. grayscale로 저장 Disparity GA-net을 통해 추출되는, disparity를 시각화(visualization)한 파일. RGB로 저장 Confidence_save photo-consistency 방식을 통해 GA-net으로 추출된 disparity의 신뢰성을 측정하기 위해 생성된 이미지. 각 픽셀에 대해 좌우 이미지의 밝기 차이(0~255) 값이 들어있음 Confidence confidence_save의 값을 분석하여 2진화한 파일. 본 과제에서는 전체 pixel 갯수 중 1의 갯수의 합이 20% 이상인 것만 취함 * 1 : true confidence (백색) * 0 : false confidence(흑색) Crop_Left GA-net의 입력 이미지로 쓰이는 Stereo Camara의 왼쪽 이미지. 1920x592 Crop_Right GA-net의 입력 이미지로 쓰이는 Stereo Camera의 오른쪽 이미지. 1920x592 Raw_Left 원본의 왼쪽 이미지. 1920x1080 Raw_Right 원본의 오른쪽 이미지. 1920x1080 * calibration 파일 : 좌우카메라의 상대적 위치, 광학 특성 등 스테레오 영상에서 depth를 구하기 위해 좌우 영상 보정 정보를 담고 있는 파일임. 폴더 단위로 제공
구축량
- Bounding Box 데이터셋 : 35만
- 인도보행에 장애가 되는 객체 29종에 대해 ‘박스’ 형태로 어노테이션한 데이터 - Polygon 데이터셋 : 10만
- 인도보행에 장애가 되는 객체 29종에 대해 ‘폴리곤’ 형태로 어노테이션한 데이터 - Surface Masking 데이터셋 : 5만
- 인도 노면 상태(재질, 특수성, 파손여부 등)정보를 ‘폴리곤’ 형태로 어노테이션하고 마스킹한 데이터 - Depth Prediction 데이터셋 : 17만
- 스테레오 카메라를 이용한 깊이 인식
-
데이터 성능 점수
측정값 (%)기준값 (%)데이터 성능 지표
데이터 성능 지표 번호 측정항목 AI TASK 학습모델 지표명 기준값 점수 측정값 점수 1 관계분석 Estimation RCN + NFFNN Accuracy % 96 % 2 개체인식 Object Detection CNN Accuracy % 99 % 3 거리 인식 모델(Depth Prediction) Object Detection PSM-net Inverse D1-all 80 % 96 % 4 객체 인식 모델(Bounding Box) Object Detection Faster RCNN mAP@IoU 0.5 38 % 79 % 5 객체 인식 모델(Polygon) Object Detection MASK RCNN mAP@IoU 0.5 55 % 65.7 % 6 보행가능구역 인식 모델(Surface Masking) Object Detection Deep Lab v3 mIoU 70 % 77 %
※ 데이터 성능 지표가 여러 개일 경우 각 항목을 클릭하면 해당 지표의 값이 그래프에 표기됩니다.
※ AI모델 평가 지표에 따라 측정값의 범위, 판단 기준이 달라질 수 있습니다. (ex. 오류율의 경우, 낮을수록 좋은 성능을 내는 것으로 평가됩니다)
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.1 2021.03.31 개인정보 비식별화 여부 확인 후 개방 1.0 2019.12.31 데이터 최초 개방 구축목적
- 장애인 이동권 신장
- 인공지능의 도움으로 장애인 보행에 위협요소인 각종 장애물(자동차, 사람, 가로수, 가로등 등)과 파손 등으로 위험한 보행 노면을 피해 보다 안전하고 원활한 장애인 이동권 보장 - 인도보행 인공지능 분야 공개데이터 셋의 부족
- 국내 인도보행영상 데이터셋 구축 사례 전무한 상태에서 국내 환경 맞춤형 데이터셋 구축 필요 자율주행 분야에서 차도뿐 아니라 생활도로, 인도 등의 국내 다양한 도로형태에서의 데이터 셋 구축
활용분야
공통
- 본 데이터셋 고도화를 통한 AI 개발 상용 서비스 개발 지원
- 장애인 보행권 확보를 위한 공익성 높은 AI 시범 서비스 개발 지원
Ex. 휠체어 자율 주행, 보행 보조기, 퍼스널 네비게이터
산업분야
- 노면 인식 기술을 활용한 안전한 도로(Safety Road) 서비스 개발
: 보도블록, 점자블록 등 인도 파손 관련 여러 상태에 대한 탐지 후 안내 서비스 - 인도 파손 현황의 지능형 탐지(파손 속도를 파악 및 예측하여 위험도 알림) 서비스 개발
- 한국형 딜리버리봇 등 인도상 자동 주행 서비스, 인도 종합 모니터링 시스템 개발
- 오토바이, 전동킥보드, 자전거, 보드 등을 이용한 이동 및 배달 서비스에 위험 모니터링 시스템 개발
연구분야
- AI기술을 이용 인도상의 객체 인식 기술
: 인도상 이동체(자전거, 버스, 승용창/승합차, 리어카/손수레, 고양이, 개, 오토바이/스쿠터, 이동식 홍보 전시물/안내판, 사람, 두발로 탈 수 있는 기구, 유모차, 트럭, 휠체어)와 고정체(바리케이드, 벤치, 볼라드, 1인 의자, 소화전, 독립단말기/작은 점포, 주차요금정산기, 대/기둥, 화분, 전력제어함, 버스/택시 정류장, 탁자, 신호등, 신호등제어기, 교통표지판, 가로수 기둥)에 대한 객체 인식 - 기술 연구
: 인도상 한국형 객체 학습을 통한 국내 맞춤형 객체 인식 기술 개발인도 설치물 정상적 설치 여부 확인 기술
: 인도 설치물의 vision 기반 정상/비정상 파악을 통한 사회 시설물 및 환경에 대한 연구 - Stereo vision을 이용한 Depth Prediction 연구
- 도로상의 파손, 도로 타입 등의 객체 학습을 통한 기술 개발
사례
- 성남시 오픈 이노베이션 챌린지 대회(바로가기)
구축량
- Bounding Box 데이터셋 : 35만
- 인도보행에 장애가 되는 객체 29종에 대해 ‘박스’ 형태로 어노테이션한 데이터 - Polygon 데이터셋 : 10만
- 인도보행에 장애가 되는 객체 29종에 대해 ‘폴리곤’ 형태로 어노테이션한 데이터 - Surface Masking 데이터셋 : 5만
- 인도 노면 상태(재질, 특수성, 파손여부 등)정보를 ‘폴리곤’ 형태로 어노테이션하고 마스킹한 데이터 - Depth Prediction 데이터셋 : 17만
- 스테레오 카메라를 이용한 깊이 인식
대표 도면
필요성
- 장애인 이동권 신장
- 인공지능의 도움으로 장애인 보행에 위협요소인 각종 장애물(자동차, 사람, 가로수, 가로등 등)과 파손 등으로 위험한 보행 노면을 피해 보다 안전하고 원활한 장애인 이동권 보장 - 인도보행 인공지능 분야 공개데이터 셋의 부족
- 국내 인도보행영상 데이터셋 구축 사례 전무한 상태에서 국내 환경 맞춤형 데이터셋 구축 필요 - 사회-경제적 약자 및 취약 계층을 위한 일자리 창출
- AI 기술 산업이 제4차 산업혁명으로 급변하는 산업 환경에서 노동 시장으로부터 급격히 소외되리라 예측되는 사회경제적 약자와 취약계층에게 오히려 새로운 노동 기회를 부여하는 긍정적 역할의 가능성 확인
구축내용
- Bounding Box/Polygon Segmentation 데이터셋 : 인도보행시 충돌위험이 존재하는 이동체와 고정체를 분석하여 29종 장애물 객체로 정의하고 어노테이션함
상식 데이터 구축내용 표 (구축년도,데이터종류,포함내용,제공방식) 대분류 소분류 라벨명(뜻) 장애물 이동체 bicycle(자전거)
bus(버스)
car(승용차, 승합차)
carrier(리어카, 손수레)
cat(고양이)
dog(개)
motorcycle(오토바이, 스쿠터)
movable_signage(이동식 홍보 전시물/안내판)
person(사람)
scooter(변속 기어가 없는 이륜차, 두 발로 탈수 있는 기구)
stroller(유모차)
truck(트럭)
wheelchair(휠체어)고정체 barricade(바리케이드)
bench(벤치)
bollard(볼라드)
chair(1인 의자)
fire_hydrant(소화전)
kiosk(한쪽이 열리는 작은 점포/ATM기기 등 독립된 단말기)
parking_meter(주차요금정산기)
pole(대/기둥)
potted_plant(화분)
power_controller(전력제어함)
stop(버스/택시 정류장)
table(탁자)
traffic_light(신호등)
traffic_light_controller(신호등제어기)
traffic_sign(교통표지판)
tree_trunk(가로수 기둥)- Surface Masking 데이터셋 : 노면의 안전성 부족으로 인한 위험유발가능성을 고려하여 노면 특성(재질, 특수성, 파손여부 등)에 따라 20종 노면 객체 및 속성을 정의하고 어노테이션 및 마스킹 처리함
상식 데이터 구축내용 표 (구축년도,데이터종류,포함내용,제공방식) 대분류 소분류 라벨명(뜻) 노면 alley
(사람과 차가 함께 다닐 수 있는 길)
crosswalk (횡단보도)
damaged (파손)
normal (일반)
speed_dump (과속방지턱)bike_lane
(자전거도로)(속성값 없음) braille_guide_blocks (점자블록) damaged (파손)
normal (일반)caution_zone
(주의구역)grating (그레이팅)
manhole (맨홀)
repair_zone (보수구역)
stairs (계단)
tree_zone (가로수영역)roadway
(차만 다닐 수 있는 길)crosswalk (횡단보도)
normal (일반)sidewalk
(인도)asphalt (아스팔트)
blocks (보도블럭)
cement (시멘트)
damaged (파손)
other (기타)
soil_stone (흙/돌)
urethane (우레탄)- Depth Prediction 데이터셋 : 하나의 Depth Prediction 데이터셋에 해당하는 8개의 파일은 아래와 같음
상식 데이터 구축내용 표 (구축년도,데이터종류,포함내용,제공방식) 파일명 내용 Disparity16 GA-net을 통해 추출되는, disparity의 data(좌우 이미지에서 대응점의 x축 상 pixel 차이, 거리감을 나타내는 data)가 저장된 파일. grayscale로 저장 Disparity GA-net을 통해 추출되는, disparity를 시각화(visualization)한 파일. RGB로 저장 Confidence_save photo-consistency 방식을 통해 GA-net으로 추출된 disparity의 신뢰성을 측정하기 위해 생성된 이미지. 각 픽셀에 대해 좌우 이미지의 밝기 차이(0~255) 값이 들어있음 Confidence confidence_save의 값을 분석하여 2진화한 파일. 본 과제에서는 전체 pixel 갯수 중 1의 갯수의 합이 20% 이상인 것만 취함 * 1 : true confidence (백색) * 0 : false confidence(흑색) Crop_Left GA-net의 입력 이미지로 쓰이는 Stereo Camara의 왼쪽 이미지. 1920x592 Crop_Right GA-net의 입력 이미지로 쓰이는 Stereo Camera의 오른쪽 이미지. 1920x592 Raw_Left 원본의 왼쪽 이미지. 1920x1080 Raw_Right 원본의 오른쪽 이미지. 1920x1080 * calibration 파일 : 좌우카메라의 상대적 위치, 광학 특성 등 스테레오 영상에서 depth를 구하기 위해 좌우 영상 보정 정보를 담고 있는 파일임. 폴더 단위로 제공
데이터 구조
- 파일 형식 : XML(단, Depth Prediction 데이터셋은 예외)
- 데이터 구조 : meta + image
- 공통정보 meta
특허 데이터 구축내용 표 (구축년도,데이터종류,포함내용,제공방식) Tag 설명 task id task의 고유번호 서버에서 관리하는 값으로 자동으로 부여 name task의 이름 size task의 사이즈 mode task의 작업 모드 (default:annotation)
annotation은 이미지, Interpolation은 동영상 작업overlap task가 동영상인 경우 task간 겹쳐진 프레임의 개수 bugtracker 이슈 관리 flipped 뒤집힘 여부 created task가 생성된 시간 updated task가 수정된 시간 start_frame task의 시작 frame 정보 (default:0) stop_filter task의 종료 frame 정보 (default:0) frame_filter task filter 정보 (default:0) labels 라벨 리스트(라벨은 label name,attribute로 구성 segements task를 등록했을 경우 segments 관련 정보 owner annotation 작업자 관련 정보 dumped xml 다운로드 받은 시간 - 이미지별 어노테이션 정보
특허 데이터 구축내용 표 (구축년도,데이터종류,포함내용,제공방식) Tag Attribute 설명 image id image 고유번호 name image 이름 width image 너비 height image 높이 box label 레이블명 occluded 가림/잘림 표시 xtl/ytl box에서 좌상단 x/y 좌표(X Top Left/Y Top Left) xbr/ybr box에서 우하단 x/y 좌표(X Bottom Right/Y Bottom Right) z_order 객체가 그려진 순서 정보 polygon label 레이블명 points polygon에서 폴리곤의 포인트 좌표 occluded 가림/잘림 표시 z_order 객체가 그려진 순서 정보 group_id polygon에서 그룹화 작업의 정보 group_id 값이 같으면 같은 그룹 attribute name 속성값 - 장애인 이동권 신장
-
데이터셋 구축 담당자
수행기관(주관) : ㈜테스트웍스
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 윤석원 02-420-5178 aiworks_data@testworks.co.kr · AI 학습용 데이터 설계 / 가공 수행기관(참여)
수행기관(참여) 기관명 담당업무 (사)한국척수장애인협회 · 데이터 수집/정제, 비식별화 ㈜셀렉트스타 · 데이터 수집/정제 카이스트 RCV · 데이터 설계 / 검증
· 객체/거리 인식 모델 프로토타입 개발㈜디투리소스 · 인도노면안전성모니터링 시범 서비스 개발 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 AI DATA 사업본부(테스트웍스) 02-420-5178 aiworks_data@testworks.co.kr
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.
오프라인 데이터 이용 안내
본 데이터는 K-ICT 빅데이터센터에서도 이용하실 수 있습니다.
다양한 데이터(미개방 데이터 포함)를 분석할 수 있는 오프라인 분석공간을 제공하고 있습니다.
데이터 안심구역 이용절차 및 신청은 K-ICT빅데이터센터 홈페이지를 참고하시기 바랍니다.

국방데이터 개방 안내
본 데이터는 국방데이터로 군사 보안에 따라 AI허브에서 데이터를 제공하지 않으며,
군 담당자를 통한 별도의 사용 신청이 필요합니다.
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의