상용 자율주행차 야간 자동차 전용도로 데이터
- 분야교통물류
- 유형 3D , 이미지
-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.2 2023-12-08 데이터 최종 개방 1.1 2023-10-31 데이터 최초 개방 1.0 2023-07-31 데이터 개방(Beta Version) 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2024-11-01 산출물 수정 AI모델 환경 설치가이드 2023-12-08 산출물 전체 공개 2023-10-31 데이터 설명서, 구축가이드, 교육활용동영상 공개 소개
인적 자원을 활용하여 직접 운전하여 취득한 데이터가 아닌 실제로 활용되고 있는 상용 자율주행차량을 활용하여 야간 자동차 전용도로 환경에서 취득된 2D 이미지 데이터 및 3D LiDAR 데이터를 기반으로 다양한 유형의 교통 환경에 대한 자율주행차량의 판단/제어 차량 데이터를 활용하여 자율주행 기술 향상을 위한 데이터를 구축
구축목적
야간 자동차 전용도로 상황에서 발생하는 다양한 유형의 교통환경에 대한 데이터 기반, 도로 인지기능 향상을 목적으로 인공지능 모델 개발을 위한 데이터 구축
-
메타데이터 구조표 데이터 영역 교통물류 데이터 유형 3D , 이미지 데이터 형식 jpg, pcd 데이터 출처 직접 획득 라벨링 유형 세그멘테이션, 3D 큐보이드 라벨링 형식 json 데이터 활용 서비스 주행 환경에서 감지되는 동적, 정적, 도로 객체를 인식하여 자율주행 차량에 발생할 수 있는 사고 및 위험을 사전에 파악하여 보다 안전하고 효율적인 자율주행 인공지능 서비스 데이터 구축년도/
데이터 구축량2022년/(원천데이터) ①jpg : 401,200장 ②pcd : 80,240건 ⓷png : 80,240장 (라벨링데이터) ①json : 80,240개(이미지 페어), ②json : 80,240개(pcd 페어) (메타데이터) ①센서 데이터(json) : 161,480개, ②메타 데이터(json) : 2,006개 -
1. 원천 데이터 구축 규모
1-1. 원천 2D 이미지 데이터 규모
※ 한 개의 scene 별로 카메라 채널 별 40장 이미지 (20sec 당 2Hz 단위)
※ 5개의 카메라 채널을 통한 이미지 취득 및 전방 세그멘테이션 마킹 이미지 추가 제공원천 2D 이미지 데이터 규모 1차 경로 2차 경로 3차 경로 포맷 수량 비고 scene sensor_raw_data camera jpg 40 전방 이미지(학습데이터 이미지) camera_3ch png 40 전방 세그멘테이션 마킹 이미지 camera_leftfront jpg 40 좌측 전방 이미지 camera_leftrear jpg 40 좌측 후방 이미지 camera_rightfront jpg 40 우측 전방 이미지 camera_rightrear jpg 40 우측 후방 이미지 . . . . . . . . . . . . scene sensor_raw_data camera jpg 40 전방 이미지(학습데이터 이미지) camera_3ch png 40 전방 세그멘테이션 마킹 이미지 camera_leftfront jpg 40 좌측 전방 이미지 camera_leftrear jpg 40 좌측 후방 이미지 camera_rightfront jpg 40 우측 전방 이미지 camera_rightrear jpg 40 우측 후방 이미지 총 수량 481,440 2,006씬 폴더 1. 1-2. 원천 3D 이미지 데이터 규모
※ 한 개의 scene 별로 점군 데이터(Point Culoud Data) 40장 (20sec 당 2Hz 단위)원천 3D 이미지 데이터 규모 1차 경로 2차 경로 3차 경로 포맷 수량 비고 scene sensor_raw_data lidar pcd 40 라이다 데이터 기반 공간 이미지 . . . . . . . . . . . . scene sensor_raw_data lidar pcd 40 라이다 데이터 기반 공간 이미지 총 수량 80,240 2,006씬 폴더 1-3. 원천 메타 데이터 규모
원천 메타 데이터 규모 1차 경로 포맷 수량 비고 scene json 1 1개의 scene 별로 해당 scene의 메타 데이터를 포함하고 있어 폴더별로 1개만 존재 . . . ex)16_115720_220823_meta_data . . . scene json 1 총 수량 2,006 2,006씬 폴더 1-4. 원천 sensor 데이터
원천 sensor 데이터 1차 경로 2차 경로 포맷 수량 비고 scene sensor_raw_data json 40 주행 환경 속성 정보 . . . . . . . . . . scene sensor_raw_data json 40 주행 환경 속성 정보 총 수량 80,240 2,006씬 폴더 1-5. 원천 procssing 데이터
원천 procssing 데이터 1차 경로 2차 경로 포맷 수량 비고 scene processing_data json 40 자율주행 차량 속성 정보 . . . . . . . . . . scene processing_data json 40 자율주행 차량 속성 정보 총 수량 80,240 2,006씬 폴더 2. 라벨링 데이터 규모
※2D 이미지의 데이터 가공은 전방 이미지만 가공 진행라벨링 데이터 규모 1차 경로 2차 경로 포맷 수량 비고 scene sensor_raw_data camera json 40 2D 전방 이미지 세그멘테이션 학습 데이터 lidar json 40 3D 이미지 큐보이드 학습 데이터 . . . . . . . . . . scene sensor_raw_data camera json 40 2D 전방 이미지 세그멘테이션 학습 데이터 lidar json 40 3D 이미지 큐보이드 학습 데이터 총 수량 160,480 2,006씬 폴더 -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드1. 데이터 활용
데이터 활용 데이터명 1-036-096. 상용 자율주행차 야간 자동차 전용도로 데이터 학습 모델 상용 자율주행차 야간 자동차 전용도로 인식 AI 모델 모델 2D 세그멘테이션 Swin Transformer 3D 큐보이드 PointPilars 성능 지표 2D 세그멘테이션 mIOU 0.65 이상 3D 큐보이드 mAP 0.65 이상 개발 내용 2D 세그멘테이션 구축되는 학습데이터를 활용하여 컬러 이미지를 픽셀 단위로 학습하여 주행 환경에서 포착되는 객체들을 기반으로 동적객체, 정적객체, 도로객체를 분류 및 탐지 실행 3D 큐보이드 LiDAR 센서로 구축된 데이터를 활용하여 사람의 눈과 같은 역할로 객체를 인지하며 거리를 판단하여 주행 환경에서 발생할 수 있는 돌발상황을 대비하여 정지 또는 회피 기동하는 동작의 판단 근거로 활용 응용서비스 2D 세그멘테이션 전기차 자율주차시스템, 차량 전방 차선 인식 시스템, GPS/Camera/LiDAR를 접목시킨 차량 호출 서비스 3D 큐보이드 자율주행셔틀을 활용한 Last Mile Mobility 서비스, 차량 전방위 장애물 탐지 시스템, GPS/Camera/LiDAR를 접목시킨 차량 호출 서비스 2. 응용 서비스
2.1 전기 상용차 기반 자율충전 모델 개발
- 전기 상용차가 무선 충전 패드의 위치를 정밀 인식하여 무선 충전 패드가 설치된 공간에 자율주차를 하여 자율주행 배송 서비스 구현
- 전기 상용차 전용 주차 가능구역을 검출하여 주차 구역과의 거리를 활용하여 위치 인식을 수행함.
- 주차 및 출차 상황에서 주차선과 차량의 교차 상황을 판단하고 주차 상태를 판단함.
- 운행 상황에서 주변 장애물을 검출함으로써 주차 및 출차 시 차량 주행에 방해가 되는 장애물을 회피하거나 보행자를 검출하여 경고를 출력함.
- 사람의 개입 없이 전기차 기반 상용 자율주행차가 무선 충전 패드의 위치를 인식하고 위치하여 자율 충전이 가능하도록 하며 정밀한 위치 인식을 통해 무선 충전의 효율성을 높임.AI 데이터 활용 응용 서비스 기능 프로세스 AI 데이터 활용 응용 서비스 기능 프로세스 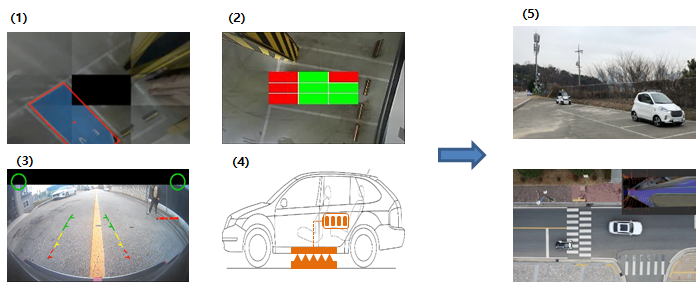
(1) 전기차 전용 충전구역 검출 (2) 주차 및 출차 상황에서 전기차 충전구역 주차선과 차량의 교차 상황 판단 (3) 주차 및 출차 상황에서 주변 장애물 검출 (4) 무선 충전 패드 정밀 위치 추정 (5) 실증 평가 2.2 라스트 마일 모빌리티(Last Mile Mobility)
- 라스트 마일(Last Mile)은 목적지에 도달하는 마지막 1마일(1.6km) 내외의 최종 구간을 의미하는 것으로 지하철역, 버스정류장에서부터 집 또는 회사까지의 단거리를 이동할 수 있는 수단을 서비스할 수 있음. 활용 가능한 서비스 수단은 스마트 모빌리티, 전동스쿠터, 전기자전거, 초소형 전기차, 전기버스 등이 있음. 위에 제시한 자율주행 전기셔틀버스도 라스트 마일 모빌리티 서비스로 활용가능함. 라스트 마일 모빌리티 시장에서는 물류 및 차량공유업체를 통한 무인 배달 서비스도 선보일 수 있음.
- 충북대 오창캠퍼스는 버스정류장이 위치해 있어 충북대 오창캠퍼스 내에 위치한 기업, 공공기관의 직장인 및 인근 학교의 학생들이 직장과 학교에서 버스정류장에 이르는 단거리를 자율주행 전기셔틀버스를 이용하여 편리하게 이동할 수 있음.
- 라스트 마일 모빌리티는 시속 40km/h 이내의 저속 운행으로 단거리의 목적지까지 안전하게 운행할 수 있는 모빌리티 서비스로 충북대 C-track을 중심으로 전기셔틀버스 서비스 구현이 가능함.Last Mile Mobility 서비스 수단 Last Mile Mobility 서비스 수단 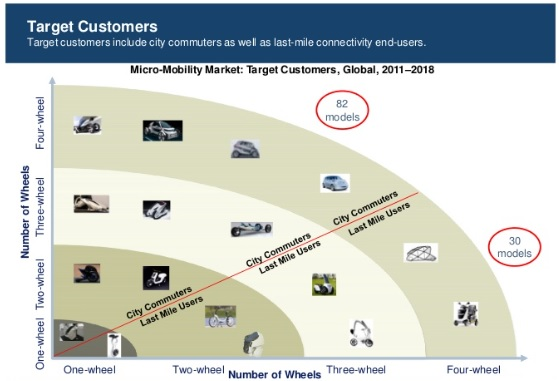
3. 응용서비스 개발
3.1 상용 자율주행 차량의 군집주행 시스템
- 상용 자율주행 차량 군집주행 시뮬레이터 개발 방안
- 기존의 승용차의 개별 주행에만 한정되어 있는 자율주행 개발용 시뮬레이터 소프트웨어에서 벗어나 상용 차량의 군집 주행에 사용되는 자율주행 기술을 개발할 수 있는 시뮬레이터를 개발하는 등으로 구축 데이터를 활용
- 또한 마찬가지로 승용차 뿐만 아니라 상용차의 군집 주행 환경에서의 자율주행 기술을 구축된 데이터에 적용하여 주행 성능을 평가하는 군집주행 자율주행 경진대회 등을 개최하여 국내 상용차량용 자율주행 기술의 개발 촉진3.2 차량 전방 모니터링 시스템
- 전방 카메라를 통한 전방의 객체(건물, 사고, 차량)등의 정보 차량 정면에 표시
- 현재 HUD(Head-Up-Display)로 이용중인 네비게이션 혹은 다양한 정보들을 전방 카메라를 통해 건물(세부위치), 사고정보 차량 등을 차량정면에 표시
- 차량 내부에서 보는 외부 전경을 자신이 원하는 화면으로 변경[ex. 비오는 날 화창한 날의 도로 풍경으로 변경(denoising시스템을 활용), 차량 커스텀(인식된 차량에 대한 색상 등의 변경), 풍경 커스텀] -
데이터 성능 점수
측정값 (%)기준값 (%)데이터 성능 지표
데이터 성능 지표 번호 측정항목 AI TASK 학습모델 지표명 기준값 점수 측정값 점수 1 3D 큐보이드 성능 Object Detection PointPillars mAP 65 % 77.785 % 2 2D 세그멘테이션 성능 Object Detection SwinTransformer + UperNet mIoU 65 % 72.75 %
※ 데이터 성능 지표가 여러 개일 경우 각 항목을 클릭하면 해당 지표의 값이 그래프에 표기됩니다.
※ AI모델 평가 지표에 따라 측정값의 범위, 판단 기준이 달라질 수 있습니다. (ex. 오류율의 경우, 낮을수록 좋은 성능을 내는 것으로 평가됩니다)
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드1. 원천 메타 데이터 구성
1-1. 원천 메타 통계 데이터 속성원천 메타 통계 데이터 속성 구분 속성명 타입 필수여부 설명 예시 1 car_type string Y 차량 정보 “Lestar” 2 date string Y 수집 날짜 “2022-09-20” 3 time string Y 수집 시간 “21:23:15” 4 zone string Y 수집 구간 "대구-화원 자동차전용도로", 5 road_type string Y 도로 형태 "자동차전용도로" 6 weather boolean Y 날씨 "맑음" 7 fog boolean Y 안개/연무/박무/황사 FALSE 8 backlight boolean Y 역광 FALSE 9 precipitation number Y 강수량 0 10 speed_type number Y 차량 속도 3 : 71~km/h, 11 traffic_type number Y 교통 흐름 0 : 한산 12 edge_case array N 엣지 케이스 13 calibration array Y 캘리브레이션 1-2. 원천 메타 데이터 속성 JSON 예시
{
"car_type": "Lestar",
"date": "2022-09-20",
"time": "21:23:15",
"zone": "대구-화원 자동차전용도로",
"road_type": "자동차전용도로",
"weather": "맑음",
"fog": false,
"backlight": false,
"precipitation": 0.0,
"speed_type": 3,
"traffic_type": 0,
"edge_case": [
"선행차 주행"
],
"calibration": {
"lidar": {
"left": {
"Tx": 0.0,
"Ty": 1.09,
"Tz": 1.11,
"Yaw": 6.84,
"Roll": 359.19,
"Pitch": 359.19
-이하 생략-2. 2D 세그멘테이션 데이터 구성
2-1. 2D 세그멘테이션 라벨링 데이터 구성2D 세그멘테이션 라벨링 데이터 구성 구분 속성명 타입 필수여부 설명 예시 1 annotations array Y 어노테이션 정보 1-1 polygon array Y 라벨링 값 [25,135,289,647.....317,541] 1-2 class string Y 클래스명 “vehicle” 2 information string Y 파일 정보 2-1 filename string Y 이미지 파일명 24_211028_220920_02.jpg 2-2 resolution array Y 이미지 해상도 [1920,1080] 2-2. 2D 세그멘테이션 라벨링 데이터 예시
2D 세그멘테이션 라벨링 데이터 예시 

{
"annotations": [
{
"polygon": [
0,
851,
169,
852,
.
.
946,
854,
952,
855,
],
“class”: “truck”
}
],
"information": {
"filename": "24_211028_220920_02.jpg",
"resolution": [
1920,
1080
]
}
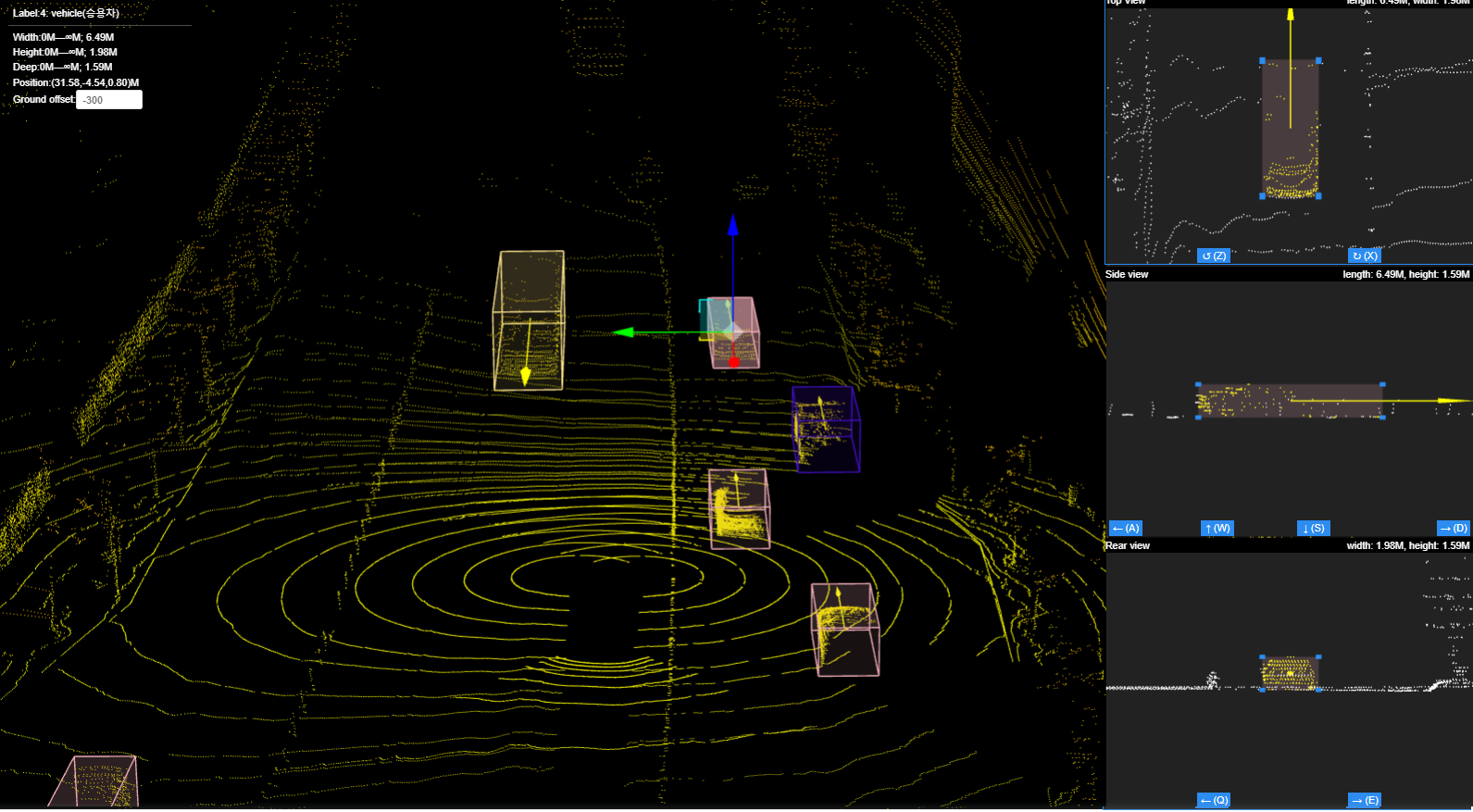
}3. 3D 큐보이드 데이터 구성
3-1. 3D 큐보이드 라벨링 데이터 구성3D 큐보이드 라벨링 데이터 구성 구분 속성명 타입 필수여부 설명 예시 1 annotations array Y 어노테이션 정보 1-1 imgname string Y 2D 이미지 파일명 24_201045_220813_02.jpg 1-2 lidarname string Y 3D 라이다 파일명 24_201045_220813_02.pcd 1-3 objects object N 1-3-1 objects object N 1-3-1-1 category string Y 객체명 "car" 1-3-1-2 truncation number N 객체 짤림 0 1-3-1-3 occlusion number N 객체 가려짐 1 1-3-1-4 box object Y 2D 라벨링 값 1-3-1-4-1 xmin number Y x좌표 최소값 24 1-3-1-4-2 ymin number Y y좌표 최소값 38 1-3-1-4-3 xmax number Y x좌표 최대값 127 1-3-1-4-4 ymax number Y y좌표 최대값 315 1-3-1-5 dimension object Y 객체 크기 수치 1-3-1-5-1 width number Y 객체 폭 수치 2.1 1-3-1-5-2 height number Y 객체 높이 수치 1.65 1-3-1-5-3 length number Y 객체 길이 수치 3.17 1-3-1-6 location object Y 3D 좌표 값 1-3-1-6-1 x3d number Y 객체 x좌표 중심 값 132 1-3-1-6-2 y3d number Y 객체 y좌표 중심 값 315 1-3-1-6-3 z3d number Y 객체 z좌표 중심 값 248 1-3-1-7 distance number Y 객체와 거리값 23.41 1-3-1-8 yaw number Y 객체 진행 방향 (z축) -1.25 1-3-1-9 subclass string Y 객체 클래스 “vehicle" 1-3-1-10 tracking_id string Y 객체 트랙킹 아이디 “12” 3-2. 3D 큐보이드 라벨링 데이터 예시
{
"annotation": {
"imgname": "24_201045_220813_02.jpg",
"lidarname": "24_201045_220813_02.pcd",
"objects": [
{
"object": {
"category": "Car",
"truncation": 0,
"occlusion": 0,
"box": {
"xmin": 662,
"ymin": 849,
"xmax": 710,
"ymax": 832
},
"dimension": {
"width": 2.2,
"height": 1.65,
"length": 5.2999
},
"location": {
"x3d": -3.1016,
"y3d": 3.6677,
"z3d": 29.8292
},
"distance": 30.1165,
"yaw": 0.0104,
"subclass": "vehicle",
"tracking_id": "1"
}
}
]
}
} -
데이터셋 구축 담당자
수행기관(주관) : ㈜미디어그룹사람과숲
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 강진규 02-830-8583 jkkang@humanf.co.kr 사업관리, 데이터 가공, 데이터 검수 수행기관(참여)
수행기관(참여) 기관명 담당업무 ㈜오토노머스에이투지 데이터 획득, 정제 경일대학교 산학협력단 데이터 획득 (재)울산테크노파크 데이터 획득 웨이즈원(주) 데이터 획득 (재)대구경북과학기술원 데이터 정제 ㈜퓨처드라이브 데이터 정제 ㈜인피닉 데이터 가공 지티원(주) 데이터 검사 (재)자동차융합기술원 데이터 검사 한국자동차연구원 데이터 검사 써로마인드 알고리즘 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 강진규 02-830-8583 jkkang@humanf.co.kr
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.
오프라인 데이터 이용 안내
본 데이터는 K-ICT 빅데이터센터에서도 이용하실 수 있습니다.
다양한 데이터(미개방 데이터 포함)를 분석할 수 있는 오프라인 분석공간을 제공하고 있습니다.
데이터 안심구역 이용절차 및 신청은 K-ICT빅데이터센터 홈페이지를 참고하시기 바랍니다.

국방데이터 개방 안내
본 데이터는 국방데이터로 군사 보안에 따라 AI허브에서 데이터를 제공하지 않으며,
군 담당자를 통한 별도의 사용 신청이 필요합니다.