대용량 3D 객체 데이터
- 분야영상이미지
- 유형 3D , 이미지
-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.0 2022-07-14 데이터 개방 데이터 최초 개방 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2025-05-08 데이터셋 변경 구축업체정보 수정 2022-10-13 샘플데이터 개방 신규 샘플데이터 개방 2022-07-14 산출물 공개 콘텐츠 최초 등록 소개
일상 생활에서 볼 수 있는 다양한 객체들이 포함된 일상 영상 및 각 영상에 대한 조밀한 3D 정보 데이터
구축목적
원천 데이터로부터 AI 모델 학습, 개발에 활용할 수 있는 데이터셋을 구축 구축된 데이터셋을 활용하여 실제 AI 모델을 개발하여 서비스 구현 가능함을 실증
-
메타데이터 구조표 데이터 영역 영상이미지 데이터 유형 3D , 이미지 데이터 형식 png, ply,obj 데이터 출처 RGB-D 카메라 직접 촬영 30만장 라벨링 유형 전면 및 후면 라벨러 라벨링 형식 바운딩 박스, 폴리곤, 큐보이드 데이터 활용 서비스 일상생활 속 다양한 객체들에 대한 대량의 인공지능을 위한 학습데이터 구축을 통해 실감 렌더링 기술, 게임 기술 등의 인공지능 기반 서비스 구축에 활용 데이터 구축년도/
데이터 구축량2021년/300,300건 -
데이터 구축 규모
- 원천 데이터 :이미지 당 평균 3개 객체(다중 객체)를 포함하는 직접 촬영 3D 이미지 30만장 3D 가공이미지, 900,000 인스턴스를 데이터 구축 목표로 설정, 이는 비교 3D Object 데이터셋인 Objectron Dataset 의 17,095 인스턴스에 대비하여, 월등히 많은 숫자임.
※참고 데이터셋: [Objectron Dataset] Objectron: A Large Scale Dataset of Object-Centric Videos in the Wild with Pose Annotations, CVPR 2021. - 학습데이터 : 직접 촬영한 일상 생활용품 대상 30만장 이상 객체 3D 이미지, 3D 세그먼테이션, 3D 바운딩 박스, 3D 포인트 클라우드와 메쉬 데이터
데이터 분포
- 데이터가 편향 없이 구축되도록 객체 카테고리 설계
- 31개 카테고리, 310개 품목:
사람(3.23%), 생활가전(1.94%), 컴퓨터/주변기기(1.94%), 디지털기기/용품(2.90%), 신발(3.55%), 모자(1.94%), 스포츠용품(3.87%), 레저/캠핑(3.87%), 홈트레이닝(3.87%), 과일(3.55%), 야채(3.55%), 제과/제빵(3.55%), 영유아용품(2.90%), 주방용품(3.87%), 청소용품(3.23%), 미용(4.84%), 공구(3.55%), 위생용품(4.19%), 생활잡화(3.87%), 애완용품(3.23%), 자동차용품(3.55%), 세탁용품(2.90%), 즉석/편의식품(2.90%), 문구/사무용품(2.26%), 악기(3.55%), 미술용품(3.23%), 게임용품(2.26%), 이벤트용품(2.26%), 가구(1.94%), 인테리어(3.23%), 의료기기(4.19%)
- 원천 데이터 :이미지 당 평균 3개 객체(다중 객체)를 포함하는 직접 촬영 3D 이미지 30만장 3D 가공이미지, 900,000 인스턴스를 데이터 구축 목표로 설정, 이는 비교 3D Object 데이터셋인 Objectron Dataset 의 17,095 인스턴스에 대비하여, 월등히 많은 숫자임.
-
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드활용 모델
- 인공지능 데이터 활용 모델 개발 요약표
인공지능 데이터 활용 모델 개발 요약표 데이터명 AI 모델 모델 성능 지표 응용서비스(예시) 실생활 투명 객체 3D 데이터 3D 객체 위치 탐지 IoU score 기반
정확도 (accuracy)3D 비전, 로봇 응용 3D 객체 자세 추정 reprojection error 기반 정확도 (accuracy) VR/AR 콘텐츠 생성 대용량 3D 객체
데이터3D 객체 위치 탐지 IoU score 기반
정확도 (accuracy)3D 비전, 로봇 응용 3D 객체 자세 추정 reprojection error 기반 정확도 (accuracy) VR/AR 콘텐츠 생성 - 데이터명 : 대용량 3D 객체 데이터
가. 인공지능 학습용 데이터 활용모델 개발 방안
적합성 검토 결과 객체 추정을 위한 모델로서 아래 모델을 선정
◇ 3D 객체 위치/자세 추정 모델
[1] Bugra Tekin, Sudipta N. Sinha and Pascal Fua. "Real-Time Seamless
Single Shot 6D Object Pose Prediction," CVPR 2018
나. 모델 선정 기준
- 대표성: 동일 혹은 비슷한 기존 데이터 셋을 이용한 실험/분석이 다수의 논문/보고서에 활용되었는지 여부
- 범용성: 동일 혹은 비슷한 task에 적용가능한 모델인지 여부
- 접근성: 사전 학습된 모델이나 오픈 소스가 공개되어 있는지 여부
- 확장성: 모델이 간결하고 복잡하지 않아, 후속 연구로 발전가능성이 있는지 여부
- 정확성: 비슷한 계산 량, 메모리를 요구하는 모델 대비 우수한 성능을 보이는지 여부
- 재현성: 보고된 성능을 무리 없이 재 구현가능한지 여부
다. 고려 사항
- 피인용이 높은 논문에서 제시한 모델 우대
- Github에서 많은 star를 받은 모델 우대
- 학계, 산업계에서 널리 사용하는 모델 우대
라. 적용 모델 개요
- 3D 객체 위치/자세 추정 모델
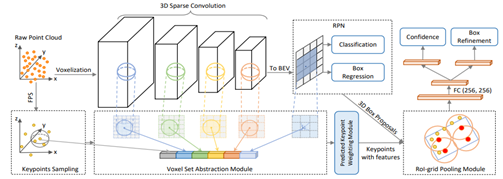
● 3D 객체 인식은 장면에 있는 객체들의 3D bounding box를 추정하고 클래스를 분류하는 task임. 2D object detection과의 차이점은 입력 데이터가 sparse하고 irregular하여 vocalization 과정이 필요한 것과, 출력물이 3차원 정보를 포함한다는 것임.
● 대표적인 인공지능 모델은 입력 point cloud 데이터로 부터 3D object detection 결과를 생성. 아래 그림처럼 sparse 하면서 irregular한 point cloud 데이터를 vocalization 혹은 grouping 한 후 3D convolution을 이용하여 feature를 추출함. 이후 추출한 feature를 이용하여 3D object bounding box 및 클래스 정보를 추론함.
● Microsoft에서 제시한 모델 Bugra Tekin, Sudipta N. Sinha and Pascal Fua. "Real-Time Seamless Single Shot 6D Object Pose Prediction," CVPR 2018에서는 3D 모델과 객체 segmentation 라벨을 활용하여 RGB 입력만으로도 실시간 객체 자세 추정을 YOLO와 유사한 구조로 제시하였음. 3D 객체 자세 추정 분야의 검증된 baseline 모델로 널리 인용되고, 최상위 학회에서의 후속 연구 역시 활발함.
3D 객체 인식 모델 예시 (1)
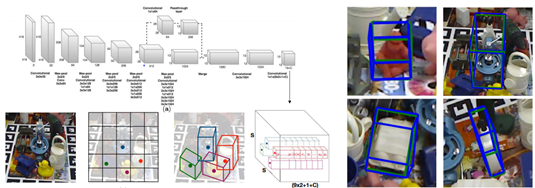
3D 객체 인식 모델 예시 (2)
마. 모델 적합성 검토
- 3D 객체 위치/자세 추정 모델\
객체 위치/자세를 추정하는 연구 중 코드 공개로 재현성이 높고 3개년 이상 후속 연구 흐름으로 검증된 코드 2개를 선정.
** 서비스 활용 시나리오**
서비스 활용 시나리오 실생활 3D 데이터 활용 방안 활용 방안 내용 적용 분야 연구 활용 ◦3D 객체 자세 추정 ◦사람과 객체 Interface 연구
◦로봇 및 자율주행 기술 연구
◦2D 이미지 학습을 이용한 3D 형상 복원 연구
◦실감 렌더링 및 관련 기술 연구◦Scene Reconstruction 산업적 활용 ◦영상기반 콘텐츠(영화, 애니메이션, 드라마, CF 등) 제작 서비스 활용 ◦구축된 투명체 및 대용량 3D 데이터의 3D 렌더링을 통한 장면 합성에 실 촬영 없이 대체재로 직접 활용
◦구축된 투명체 및 대용량 3D 데이터를 활용하여 새로운 형태의 투명체 및 대용량 3D 데이터의 AI 및 수작업 형태의 저작에 활용◦실감 미디어 (VR·AR·XR) 서비스 활용 ◦실시간 인터렉션에 활용될 수 있는 3D 투명체 및 대용량 3D 데이터의 직접 제공
◦디지털 트윈 등의 모의 제작 환경에서의 투명체 및 대용량 객체의 식별, 위치 및 자제 추정 등의 실시간 인식을 통한 로봇 제어 시뮬레이션 및 온오프라인 제작 파이프라인 구현에 활용◦디지털 홈 트윈(Digital Home Twin) 서비스 활용 ◦실내 인테리어 시뮬레이션을 위해 구축된 AI 학습용 데이터를 활용하여 가상의 실내를 시뮬레이션하는 서비스 구현에 활용 가능
◦카메라로 전배경 객체를 구축된 AI 데이터로 공간과 객체를 인식하여 새로운 가상 객체와 함께 합성하여 새로운 공간을 제안하는 서비스 구현에 활용 가능◦메타버스 서비스 활용 ◦가상 공간 내 아바타를 활용하여 구축된 AI 데이터로 학습하여 재창조된 공간 안에서의 위치, 자세 트레킹을 통한 인터렉션 서비스에 활용 가능 ◦자율주행 시스템에 활용 ◦실생활 속 객체에 대한 인식률 제고를 통한 자율주행 운송수단서비스에 활용 표 . 실생활 3D 데이터 활용 방안
-
데이터 성능 점수
측정값 (%)기준값 (%)데이터 성능 지표
데이터 성능 지표 번호 측정항목 AI TASK 학습모델 지표명 기준값 점수 측정값 점수 1 객체 3D 자세 추정 (2D reprojection error 기반) 3D Pose Estimation Real-Time Seamless Single Shot 6D Object Pose Prediction Accuracy 82.5 % 89.85 % 2 객체 3D 위치 추정 (IoU 기반) 3D Object Detection Real-Time Seamless Single Shot 6D Object Pose Prediction Accuracy 87.5 % 99.25 %
※ 데이터 성능 지표가 여러 개일 경우 각 항목을 클릭하면 해당 지표의 값이 그래프에 표기됩니다.
※ AI모델 평가 지표에 따라 측정값의 범위, 판단 기준이 달라질 수 있습니다. (ex. 오류율의 경우, 낮을수록 좋은 성능을 내는 것으로 평가됩니다)
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드데이터 형태
- 원천 데이터 : 객체 3D 이미지
- 학습 데이터 : 객체 3D 포인트 클라우드, 3D 메쉬, 3D 세그멘테이션, 3D 바운딩 박스 등 가공
데이터 내용
- 일상 생활에서 볼 수 있는 다양한 객체들이 포함된 일상 영상 및 각 영상에 대한 조밀한 3D 정보 데이터(RGB+Depth 정보)
- 일상생활의 영상에서 보이는 객체에 대한 3D 좌표 정보(위치 정보), 3D 포인트 클라우드/메쉬(형상 정보), 세그멘테이션 등 다양한 정보를 포함하여 구축
데이터 구축 규모
- - 원천 데이터 :이미지 당 평균 3개 객체(다중 객체)를 포함하는 직접 촬영 3D 이미지 30만장
- 30만장 3D 가공이미지, 900,000 인스턴스를 데이터 구축 목표로 설정, 이는 비교 3D Object 데이터셋인 Objectron Dataset 의 17,095 인스턴스에 대비하여, 월등히 많은 숫자임.
※참고 데이터셋: [Objectron Dataset] Objectron: A Large Scale Dataset of Object-Centric Videos in the Wild with Pose Annotations, CVPR 2021. - 학습데이터 : 직접 촬영한 일상 생활용품 대상 30만장 이상 객체 3D 이미지, 3D 세그먼테이션, 3D 바운딩 박스, 3D 포인트 클라우드와 메쉬 데이터
데이터 분포
- 데이터가 편향 없이 구축되도록 객체 카테고리 설계
- 31개 카테고리, 310개 품목
데이터 구축 목적
- 원천 데이터로부터 AI 모델 학습, 개발에 활용할 수 있는 데이터셋을 구축
- 구축된 데이터셋을 활용하여 실제 AI 모델을 개발하여 서비스 구현 가능함을 실증
데이터 목적
- 실감 렌더링 기술, 사람과 객체 상호작용, 로봇 시스템, 게임 기술, VR/AR/XR 등 메타버스 서비스 기술개발에 활용 가능한 데이터
1. 데이터 명세서
데이터 명 대용량 3D 객체 데이터 데이터 포맷 png (이미지 파일), ply, obj 활용 분야 일상생활 속 다양한 객체들에 대한 대량의 인공지능을 위한 학습데이터 구축을 통해 실감 렌더링 기술, 게임 기술 등의 인공지능 기반 서비스 구축에 활용 데이터 요약 장소와 객체(31개 카테고리 310개 객체)를 조합한 일상생활 이미지를 RGB-D 카메라로 촬영하여 원천데이터 확보 데이터 출처 RGB-D 카메라 직접 촬영 30만장 데이터 이력 배포버전 개정이력 신규 작성자/배포자 데이터 통계 데이터 구축 규모 30만개 원천데이터 데이터 분포 31개 카테고리, 310개 품목: 사람(3.23%), 생활가전(1.94%), 컴퓨터/주변기기(1.94%), 디지털기기/용품(2.90%), 신발(3.55%), 모자(1.94%), 스포츠용품(3.87%), 레저/캠핑(3.87%), 홈트레이닝(3.87%), 과일(3.55%), 야채(3.55%), 제과/제빵(3.55%), 영유아용품(2.90%), 주방용품(3.87%), 청소용품(3.23%), 미용(4.84%), 공구(3.55%), 위생용품(4.19%), 생활잡화(3.87%), 애완용품(3.23%), 자동차용품(3.55%), 세탁용품(2.90%), 즉석/편의식품(2.90%), 문구/사무용품(2.26%), 악기(3.55%), 미술용품(3.23%), 게임용품(2.26%), 이벤트용품(2.26%), 가구(1.94%), 인테리어(3.23%), 의료기기(4.19%) 기타 정보 대표성 객체 리스트 참조 독립성 유의사항 관련 연구 해당사항 없음 데이터 포맷
- 원천데이터 획득 과정에서 생성되는 데이터와 데이터 포맷
데이터 포맷 원천데이터 획득 과정에서 생성되는 데이터와 데이터 포맷 획득 방법 획득 데이터 데이터 포맷 1) RGB-D 카메라로 촬영 객체가 1개 이상 포함된, 일상 생활 공간 이미지 25만장(원본) png ply 2) 3D 모델링 객체 310개에 대한 고품질의 3D 모델 데이터 obj 표. 데이터 포맷 예시 데이터 종류 원천데이터 3D 포인트 클라우드 3D 메쉬 예시 


원시 데이터 포맷 png PLY OBJ 데이터 구성 HD급 (1280x720) 30K 이상 8k triangle 이상 라벨링 데이터 포맷 json json json 표. 데이터 포맷 예시가. 데이터 속성 정의
- 원천 데이터 속성 정의
가. 데이터 속성 정의 원천 데이터 속성 정의 순번 속성명 속성 설명 예시 1 identifier/filename 식별자/파일명 20210413_0001.JPG 2 dateTime 촬영일시 2021-04-13_00:00:00 3 fileFormat 파일 포맷 JPG/PNG/OBJ 4 imgSize 이미지 파일 크기 6400KB 5 imgPhotographer 촬영자 홍길동 6 device 장비정보 SS900N(삼성스마트폰노트9) 7 imgLocation 촬영위치 성북구 삼선교로 스튜디오 8 copyRight 저작권정보 초상권 9 resolution 이미지 해상도 HD급 (1280x720) 10 colorDepth 컬러깊이 24bit/px 11 ISO ISO감도 100 12 definition 선명도 초고/고/중/저 13 whiteBalance 화이트 밸런스 200K(캘빈) 14 exposureTime 노출시간 조리개+셔터스피드 15 exposureMode 노출모드 자동/수동 16 F-Stop 조리개 값 F2.8 17 flash 플래시 사용여부 사용/미사용 18 filter 필터 RED필터 19 focalLength 초점거리 35mm~50mm 20 fieldOfView 시야각(화각) 35mm (65도) 21 angle 촬영각도 8/360 (360도 회전하며 8번 촬영) 22 GPS GPS정보 GPS/GLONASS/37o30’24.7“,126o53’22.1” 23 weather 날씨 맑음/흐림/비/눈/안개 속성명 속성 설명 예시 name 라벨링 데이터셋 이름 objects_3D dateTime 데이터셋 생성일자 2021-04-13_00:00:00 imgPath 데이터셋 이미지 폴더 경로 /dataSet/objects_3D/ labelPath 데이터셋 레이블 폴더 경로 /dataSet/objects_3D/label/ category 데이터셋 종류 90001 type 데이터셋 타입 0: 이미지 데이터 구축 단계 : 데이터 라벨링 속성 정의
라벨링 데이터셋 속성가. 어노테이션 포맷
- 라벨링 메타정보
가. 어노테이션 포맷 라벨링 메타정보 No. 속성명 속성 설명 Type 예시 1 Dataset.identifier 데이터셋 식별자 string objects_3D_01_001 2 Dataset.name 데이터셋 이름 string objects_3D 3 Dataset.src_path 데이터셋 폴더 위치 string /dataSet/objects_3D/ 4 Dataset_label_path 데이터셋 레이블 폴더 위치 string /dataSet/objects_3D/label/ 5 Dataset.category 데이터셋 카테고리 string 040309 : 전동킥보드1
090001 : 가구1
020101 : USB6 Dataset.type 데이터셋 타입 number 0: 이미지,
1: 3D point cloud data
2: 3D mesh object- 라벨링 이미지 파일 공통참조항목
가. 어노테이션 포맷 라벨링 이미지 파일 공통참조항목 순번 속성명 속성 설명 Type 예시 1 images.identifier 식별자 string 20210413_0001 2 images.dateTime 촬영일시 string 2021-04-13_00:00:00 3 images.fileFormat 파일 포맷 string PNG/OBJ 4 images.imgSize 이미지 파일 크기 string 6400KB 5 images.imgPhotographer 촬영자 string 홍길동 6 images.device 장비정보 string SS900N(삼성스마트폰노트9) 7 images.imgLocation 촬영위치 string 성북구 삼선교로 스튜디오 8 images.copyRight 저작권정보 string 초상권 9 images.resolution 이미지 해상도 string HD급 (1280x720) 10 images.colorDepth 컬러깊이 string 24bit/px 11 images.ISO ISO감도 number 100 12 images.definition 선명도 string 초고/고/중/저 13 images.whiteBalance 화이트 밸런스 string 200K(캘빈) 14 images.exposureTime 노출시간 string 조리개+셔터스피드 15 images.exposureMode 노출모드 string 자동/수동 16 images.F-Stop 조리개 값 string F2.8 17 images.flash 플래시 사용여부 string 사용/미사용 18 images.filter 필터 string RED필터 19 images.focalLength 초점거리 string 35mm~50mm 20 images.fieldOfView 시야각(화각) string 35mm (65도) 21 images.angle 촬영각도 string 8/360 (360도 회전하며 8번 촬영) 22 images.GPS GPS정보 string GPS/GLONASS/37o30’24.7“,126o53’22.1” 23 images.weather 날씨 string 맑음/흐림/비/눈/안개 어노테이션 구조
바운딩박스(Bounding Box) 어노테이션 구조- 이미지 내 객체 영역에 대한 사각형 박스 형태의 어노테이션 구조
어노테이션 구조 바운딩박스(Bounding Box) 어노테이션 구조 이미지 내 객체 영역에 대한 사각형 박스 형태의 어노테이션 구조 No. 속성명 속성 설명 Type 필수여부 예시 1 annotations[].bbox.id 바운딩박스 식별자 string 선택 BBX_0001 (분류_순번) 2 annotations[].bbox.name 바운딩박스 내 객체명 string 선택 가구1 3 annotations[].bbox.category 바운딩박스 내 객체 유형 string 선택 90001 4 annotations[].bbox.x 바운딩박스 시작점 x 좌표 number 선택 100 (좌측상단 기준) 5 annotations[].bbox.y 바운딩박스 시작점 y 좌표 number 선택 120 (좌측상단 기준) 6 annotations[].bbox.width 바운딩박스 가로 길이(픽셀) number 선택 273 7 annotations[].bbox.height 바운딩박스 세로 길이(픽셀) number 선택 450 - 3D 바운딩박스(3D Bounding Box, Cuboid) 어노테이션 구조
- 이미지 내 객체 영역에 대한 3차원 육면체 박스 형태의 어노테이션 구조
어노테이션 구조 3D 바운딩박스(3D Bounding Box, Cuboid) 어노테이션 구조 이미지 내 객체 영역에 대한 3차원 육면체 박스 형태의 어노테이션 구조 No. 속성명 속성 설명 Type 필수여부 예시 1 annotations[].3dbbox.id 3D 바운딩박스 식별자 string 선택 CBD_0001 (분류_순번) 2 annotations[].3dbbox.name 3D 바운딩박스 내 객체명 string 선택 가구1 3 annotations[].3dbbox.category 3D 바운딩박스 내 객체 유형 string 선택 90001 4 annotations[].3dbbox.vertices[] 3D 바운딩박스 꼭지점 좌표 number 선택 [(10, 10, -10), ...]
[(x, y, z), ...]5 annotations[].3dbbox.edges[] 3D 바운딩박스 꼭지점 2개를 연결하는 변 좌표 number 선택 [(10, 10, 30, 10), ...]
[(x1, y1, x2, y2), ...]- 폴리곤(Polygon) 어노테이션 구조
- 이미지 내 객체 영역에 대한 다각형 형태의 어노테이션 구조
어노테이션 구조 폴리곤(Polygon) 어노테이션 구조 이미지 내 객체 영역에 대한 다각형 형태의 어노테이션 구조 No. 속성명 속성 설명 Type 필수여부 예시 1 annotations[].Polyline.id 폴리라인 식별자 string 선택 PLL_0001 (분류_순번) 2 annotations[].Polyline.name 폴리라인 내 객체명 string 선택 가구1 3 annotations[].Polyline.category 폴리라인 내 객체 유형 string 선택 90001 4 annotations[].Polyline.point[] 폴리라인 내 점(x, y)의 집합 number 선택 [(100, 105),
...(160, 104)]- 세그멘테이션(Segmentation) 어노테이션 구조
- 이미지 내 객체 영역에 대한 다각형 형태의 어노테이션 구조
어노테이션 구조 세그멘테이션(Segmentation) 어노테이션 구조 이미지 내 객체 영역에 대한 다각형 형태의 어노테이션 구조 No. 속성명 속성 설명 Type 필수여부 예시 1 annotations[].segm.id 세그멘테이션 식별자 string 선택 SEG_0001 (분류_순번) 2 annotations[].segm.name 세그멘테이션 내 객체명 string 선택 가구1 3 annotations[].segm.category 세그멘테이션 내 객체 유형 string 선택 90001 4 annotations[].segm.point[] 세그멘테이션 내 점(x, y)의 집합 number 선택 [(100, 105),
...(160, 104)]결과 JSON 구축 형태 예시 
{"metaData":{" objectName":"혀클리너","objectCode":"070606","first_category":"일상용품","second_category":"위생용품","numOfobject":"1",
"Fx":"895.3671875","Fy":"895.6848754882812","PPx":"656.15283203125","PPy":"369.93377685546875“
,"Distorsion":"None","Format":"Z16","Frame Number":"45945","Timestamp (ms)":"921837.64“
,"Resolution x":"640","Resolution y":"480“
"Bytes perpixel":"2" "Filename":"070606_000005.png","dateTime":"2021_10_25_11:47:57“
,"fileFormat":"PNG","imgSize":"1271.904KB","imgPhotographer":"이오이스“
,"device":"L515 (Intel Realsense LiDAR Camera)“
,"imgLocation":"서울 금천구 이오이스 스튜디오","resolution":"HD급 (1280x720)",
"colorDepth":"24bit/px","definition":"고","whiteBalance":"4600","F-Stop":"F2.0","flash":"미사용",
"focalLength":"1.88 mm","Horizontal Field of View":"69°","Vertical Field of View":"42°",
"Use environment":"Indoor","RGB sensor technology":"Rolling Shutter"},
"inspRejectYn":"N","labelingInfo":[{"3DBox":{"location":[{"x1":"580","y1":"374","z1":"0","x2":"611","y2":"361","z2":"0","x3":"747","y3":"449","z3":"0","x4":"716","y4":"462","z4":"0","x5":"579","y5":"392","z5":"2","x6":"610","y6":"379","z6":"2","x7":"746","y7":"467","z7":"2","x8":"715","y8":"480","z8":"2","x9":"663","y9":"420","z9":"1","x-range":168,"y-range":119}],"label":"혀클리너","type":"3DBox"}}]}학습 데이터 저장 구조 : JSON학습 데이터 저장 구조 : JSON 항목 설명 info -기본정보 identifier 데이터셋 식별자 name 데이터셋 이름 src_path 데이터셋 폴더 위치 label_path 데이터셋 레이블 폴더 위치 category 데이터셋 카테고리 type 데이터셋 타입 images – 이미지 데이터 정보 Images 항목 설명 identifier 식별자 dateTime 촬영일시 fileFormat 파일 포맷 imgSize 이미지 파일 크기 imgPhotographer 촬영자 device 장비정보 imgLocation 촬영위치 copyRight 저작권정보 resolution 이미지 해상도 colorDepth 컬러깊이 ISO ISO감도 definition 선명도 whiteBalance 화이트 밸런스 exposureTime 노출시간 exposureMode 노출모드 F-Stop 조리개 값 flash 플래시 사용여부 filter 필터 focalLength 초점거리 fieldOfView 시야각(화각) angle 촬영각도 GPS GPS정보 weather 날씨 annotations – 어노테이션 데이터 정보 annotations bbox – 바운딩 박스 어노테이션 데이터 정보 bbox 항목 설명 id 바운딩박스 식별자 name 바운딩박스 내 객체명 category 바운딩박스 내 객체 유형 x 바운딩박스 시작점 x 좌표 y 바운딩박스 시작점 y 좌표 width 바운딩박스 가로 길이(픽셀) height 바운딩박스 세로 길이(픽셀) 3dbbox – 3D 바운딩 박스(Cuboid) 어노테이션 데이터 정보 3dbbox 항목 설명 id 3D 바운딩박스 식별자 name 3D 바운딩박스 내 객체명 category 바운딩박스 내 객체 유형 vertices[] 3D 바운딩박스 꼭지점 좌표 edges[] 3D 바운딩박스 꼭지점 2개를 연결하는 변 좌표 Polygon – 폴리곤 어노테이션 데이터 정보 Polygon 항목 설명 id 폴리곤 식별자 name 폴리곤 내 객체명 category 폴리곤 내 객체 유형 points[] 폴리곤 내 점(x, y)의 집합 Polyline – 폴리라인 어노테이션 데이터 정보 Polyline 항목 설명 id 폴리라인 식별자 name 폴리라인 내 객체명 category 폴리라인 내 객체 유형 points[] 폴리라인 내 점(x, y)의 집합 segm – 세그멘테이션 어노테이션 데이터 정보 segm 항목 설명 id 세그멘테이션 식별자 name 세그멘테이션 내 객체명 category 세그멘테이션 내 객체 유형 points[] 세그멘테이션 내 점(x, y)의 집합 -
데이터셋 구축 담당자
수행기관(주관) : ㈜미소정보기술
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 강태준 02-2205-0551 tjkang@misoinfo.co.kr 사업관리 수행기관(참여)
수행기관(참여) 기관명 담당업무 ㈜이오이스 데이터 수집 ㈜미래융합정보기술 데이터 정제 (주)메트릭스리서치 데이터 가공 ㈜에스에스엘 데이터 검수 ㈜브이다임 AI응용서비스 개발 숭실대학교 산학협력단 AI모델 개발 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 이상준 02-2205-0551 sangjun9716@misoinfo.co.kr
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.
오프라인 데이터 이용 안내
본 데이터는 K-ICT 빅데이터센터에서도 이용하실 수 있습니다.
다양한 데이터(미개방 데이터 포함)를 분석할 수 있는 오프라인 분석공간을 제공하고 있습니다.
데이터 안심구역 이용절차 및 신청은 K-ICT빅데이터센터 홈페이지를 참고하시기 바랍니다.

국방데이터 개방 안내
본 데이터는 국방데이터로 군사 보안에 따라 AI허브에서 데이터를 제공하지 않으며,
군 담당자를 통한 별도의 사용 신청이 필요합니다.