-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.1 2024-01-31 데이터 최종 개방 1.0 2023-07-31 데이터 개방(Beta Version) 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2024-02-02 산출물 전체 공개 소개
자율주행차에 설치된 4D 이미징 레이다 센서를 이용하여 고속도로와 도심 주행환경에서 수집된 주행환경객체 인식을 위한 데이터셋 구축 - 주행환경객체: 중앙분리대, 방음벽, 육교, 터널, 가로수, 표지판, 램프
구축목적
4D 이미징 레이다 기반 자율주행 인공지능 학습데이터 필요 ● 자율주행차의 주행 성능은 자율주행 인공지능 성능에 의존함 ● 악천후에 안전한 자율주행을 위해 대량의 학습데이터로 학습된 4D 이미징 레이다 기반 자율주행 인공지능 모델 필요 ● 다양한 조건에서 취득된 대량의 4D 이미징 레이다 인공지능 학습데이터 구축 및 개방으로 자율주행 인공지능 모델을 개발하고자 하는 단체나 기업, 연구소에서 쉽게 자율주행 기술 개발 접근
-
메타데이터 구조표 데이터 영역 교통물류 데이터 유형 텍스트 , 이미지 데이터 형식 txt, png, pcd, json 데이터 출처 실도로 주행을 통한 데이터 취득 라벨링 유형 이미지/레이다/라이다 3D 바운딩 박스 + 폴리곤 (비정형객체에 한함) 라벨링 형식 JSON 데이터 활용 서비스 ◆ 자율주행 Level 3의 주요 시나리오인 고속도로 드라이빙 파일럿(HDP) 기능 구현에 활용 ◆ 자율주행 Level 4의 도심 주행용 로봇 택시의 객체 인식 성능 향상에 활용 데이터 구축년도/
데이터 구축량2022년/1,000,091장 -
* 데이터 구축 규모
데이터 구축 규모 시나리오 구추구축량(목표) 구축량(실적) 중앙분리대 171,400 171,400 육교 100,000 100,040 터널 입구 142,900 142,931 방음벽 171,400 171,400 가로수 142,900 142,900 램프 100,000 100,014 도로위표지판 171,400 171,406 계 1,000,000 1,000,091 * 데이터 구축 규모 (기상상황)
데이터 구축 규모 (기상상황) 항목 분류 목표(장) 목표(%) 실적(장) 실적(%) 기상상황 맑음 500,000 50% 489,273 97.85% 야간 350,000 35% 362,599 100.36% 안개 50,000 5% 49,942 99.88% 우천(소) 50,000 5% 48,797 97.59% 우천(대) 20,000 2% 19,186 95.93% 미세먼지 30,000 3% 30,294 100.98% 1,000,000 100% 1,000,091 100.01% * 데이터 구축 규모 (시간대)
데이터 구축 규모 (시간대) 항목 분류 목표(장) 목표(%) 실적(장) 실적(%) 시간대 출근 50,000 5% 48,281 96.56% 퇴근 100,000 10% 98,549 98.55% 점심 70,000 7% 73,018 104.31% 일반(오전) 190,000 19% 198,413 104.43% 일반(오후) 190,000 19% 188,931 99.44% 야간 400,000 40% 392,899 98.22% 1,000,000 100% 1,000,091 100.01% * 데이터 구축 규모 (장소)
데이터 구축 규모 (장소) 항목 분류 목표(장) 목표(%) 실적(장) 실적(%) 장소 고속도로 400,000 40% 403,793 100.95% 국도 200,000 20% 195,792 97.90% 고속화도로 200,000 20% 191,955 95.98% 도심 200,000 20% 208,551 104.28% -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드* 주행환경객체 AI 모델을 사용한 데이터 검증 과정
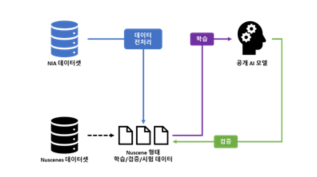
* 유효성 검증 모델
유효성 검증 모델 데이터별 유효성 검증 모델 센서 모델 카메라 CenterNet 라이다 CenterPoint 레이다 CenterPoint 카메라 + 레이다 융합 CenterFusion * 모델 구조
1) 카메라 (CenterNet) 모델의 구조

2) 라이다 / 레이다 (CenterPoint) 모델의 구조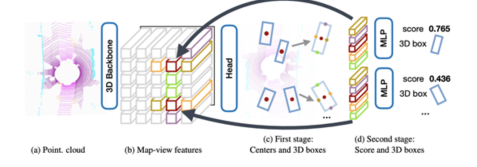
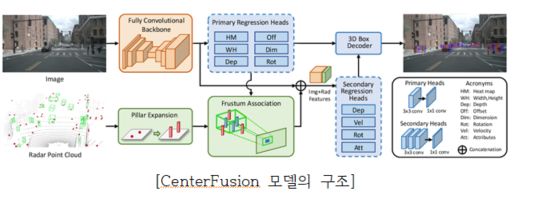
3) 융합센서 (CenterFusion) 모델의 구조
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드* 데이터셋 설계
- 고속도로와 도심 주행환경 등 다양한 도로 환경에서의 다양한 주행환경객체 학습 데이터 수집
- 자율주행을 위한 학습 데이터 종류 설계 (카메라, LiDAR, 레이다, GPS, etc.)데이터셋 설계 유형 내용 카메라영상 이미지 고속도로와 도심 주행 환경에서 수집된 주행환경객체 객체 인식을 위한 데이터 3D LiDAR 데이터 주행환경객체 등이 포함된 LiDAR 데이터 4D 이미징 레이다 데이터 주행환경객체 인식을 위한 레이다 데이터 GNSS/INS 데이터 카메라, LiDAR, 레이다가 취득 되어진 시점과 데이터 수집 차량의 3차원 정밀 위치, 방향, 속도 데이터 메타 데이터 도로 환경, 기타 특수 상황에 대한 주행 환경 데이터 * 원시 데이터 파일 포맷
원시 데이터 파일 포맷 내용 구분 데이터 포맷 값 카메라 원천 데이터 PNG FILE_NAME, FILE_TYPE 라이다 원천 데이터 PCD FILE_NAME, LENGTH, X, Y, Z, INTENSITY 레이다 원천 데이터 PCD FILE_NAME, FILE_TYPE, LENGTH, REALATIVERANGEX,REALATIVERANGEY, REALATIVERANGEZ, INTENSITY, 0, 0, 0, REALATIVESPEED 캘리브레이션 원천 데이터 TXT Lidar_camera_calib Lidar_radar_calib GNSS_INS 원천 데이터 TXT TIME_STAMP, LATITUDE, LONGITUDE, EASTING, NorthinUp, Roll, Pitch, Yaw, xAngVel, yAngVel, Yaw_rate, xAxisAcc, yAxisAcc, zAxisAcc, East velocity, North velocity, Up velocity, Vehicle Speed, Vehicle Acceleration Vehicle_info 원천 데이터 TXT TIME_STAMP, SENSOR_INDEX, STEERING, VSPEED 메타 메타 데이터 JSON Date, car, lidar, lidar_position, radar, radar_trans_matrix, radar_rot_matrix, camera, camera_trans_matrix, camera_rot_matirix, camera_intrinsic_matrix, gps, carpc, weather, road_type, holiday, record_time, remarks 라벨링 라벨링데이터 JSON * 원천데이터 가공
원천데이터 가공 구분 속성명 타입 필수여부 설명 범위 비고 1 frame_no number Y 클립 내 프레임 번호 1~100 2 annotation array 어노테이션 정보 2-1 id number Y 클립 내 3D바운딩박스 고유번호 1~ 2-2 category string Y 3D바운딩박스의클래스 11. 중앙분리대: MEDIAN_STRIP 12. 육교: OVERPASS 13. 터널 입구: TUNNEL 14. 방음벽: SOUND_BARRIER 15. 가로수: STREET_TREES 16. 램프: RAMP_SECT 17. 표지판: ROAD_SIGN 2-3 obj_type number Y 동적/주행환경객체 구분 0 1: 주행환경객체 2-4 atypicial_yn string Y 정형/비정형객체 구분 ‘y’, ‘n’ ‘y’: 비정형객체/ ‘n’: 정형객체 2-5 3d_box array 3D바운딩박스라벨링정보 2-5-1 sub_id number Y 분리라벨링의개별 3D바운딩박스ID -1 또는 1~ -1일 경우 분리 라벨링없음 2-5-2 location number Y 3D바운딩박스의중심점 좌표값 2-5-3 dimension number Y 3D바운딩박스의 너비, 높이, 깊이 0~ 2-5-4 rotation_y number Y 3D바운딩박스의회전값 -180~180 2-5-5 radar_point_cloud number Y 3D바운딩박스 내 레이다 포인트 개수 0~ 2-5-6 lidar_point_cloud number Y 3D바운딩박스 내 라이다 포인트 개수 3~ 2-5-7 2d_box array Y 카메라화면에 투영된 2D바운딩박스좌표 x, w: 0~1920 x: 2d 박스 x좌표/ y: 2d 박스 x좌표 y, h: 0~1200 w: 2d 박스 너비/ h: 2d 박스 높이 2-5-8 2d_area number Y 카메라화면에 투영된 2D바운딩박스 픽셀 면적 0~ 2-6 camera_visibility string Y 카메라화면 상 식별가능여부 ‘y’, ‘n’ ‘y’: 카메라 상 식별 가능 ‘n’: 카메라 상 식별 불가능 2-7 2d_polygon array 비정형객체의 폴리곤 좌표 x: 0~1920 y: 0~1200 
-
데이터셋 구축 담당자
수행기관(주관) : ㈜스마트레이더시스템
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 권정순 1533-0217 jskwon@srs.ai 기획 수행기관(참여)
수행기관(참여) 기관명 담당업무 ㈜에스피티에너지 3D 바운딩 박스 + 폴리곤 가공, 라벨링 품질 관리 및 검수 오류 데이터 재가공 ㈜에이아이빌 3D 바운딩 박스 + 폴리곤 가공, 라벨링 품질 관리 및 검수 오류 데이터 재가공 ㈜에이유 3D 바운딩 박스 + 폴리곤 가공, 라벨링 품질 관리 및 검수 오류 데이터 재가공 ㈜티큐에스코리아 3D 바운딩 박스 + 폴리곤 가공, 라벨링 품질 관리 및 검수 오류 데이터 재가공 숙명여자대학교 학습모델 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 권정순 1533-0217 jskwon@srs.ai
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.
오프라인 데이터 이용 안내
본 데이터는 K-ICT 빅데이터센터에서도 이용하실 수 있습니다.
다양한 데이터(미개방 데이터 포함)를 분석할 수 있는 오프라인 분석공간을 제공하고 있습니다.
데이터 안심구역 이용절차 및 신청은 K-ICT빅데이터센터 홈페이지를 참고하시기 바랍니다.

국방데이터 개방 안내
본 데이터는 국방데이터로 군사 보안에 따라 AI허브에서 데이터를 제공하지 않으며,
군 담당자를 통한 별도의 사용 신청이 필요합니다.