-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.1 2023-12-06 데이터 최종 개방 1.0 2023-06-14 데이터 개방(Beta Version) 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2023-12-27 산출물 전체 공개 소개
● 10,000개의 3D 모델링 에셋과 각 에셋에 대한 다시점(서로 다른 24개 시점)에서 RGB, Mask, Dept, Normal 4개의 2D 라벨링 이미지를 유니티 게임 엔진을 활용하여 추출한 960,000장의 2D 라벨링 이미지 데이터셋 ● 3D 모델링 에셋은 fbx와 obj 파일 형식으로 제공되며, 라벨링 이미지는 png 파일 형식으로 제공. 모델링 에셋에 대한 material, 에셋 번호 등 속성정보와 24개 시점에 대한 카메라 정보, 파일경로정보는 json 파일에 저장되어 제공.
구축목적
● 디지털 트윈, 메타버스 시장의 급성장으로 3D 에셋의 필요성이 부각됨. 향후 메타버스 플랫폼에 대한 니즈와 수요가 늘어날 것이고 3D 객체 데이터가 구축이 되어야 실제 사물에 대한 정확한 정보를 활용하여 메타버스 내에서도 구체적으로 3D 객체의 외관 복원이 이루어질 수 있음 ● 3D 데이터가 부족한 상황에서, 3D 객체 생성과 복원, 가상환경 구축, 데이터 증강 등의 다양한 문제 해결과 3D 알고리즘 학습 기술발전을 위해 양질의 3D 에셋 및 사물 모델링 이미지 쌍 데이터를 구축함
-
메타데이터 구조표 데이터 영역 영상이미지 데이터 유형 3D , 이미지 데이터 형식 fbx, obj, mtl, png 데이터 출처 크라우드 워커 창작 3D 에셋, 3D 에셋 가공 이미지 라벨링 유형 3D 에셋 가공 이미지 카메라 정보(텍스트), 3D 에셋 정보(텍스트) 라벨링 형식 JSON 데이터 활용 서비스 3D와 2D간의 복원, 3D에셋 AI학습(생성), Grab Tasking, 메타버스에서 3D 에셋 활용 데이터 구축년도/
데이터 구축량2022년/3D에셋 10,000개, 3D에셋 가공 이미지 960,000장 -
데이터 구축규모
3D 에셋 모델링 데이터 구축 규모과제명 데이터 설명 데이터 형식 파일 수 전체 용량 3D 에셋-사물 모델링 이미지 쌍 데이터 3D 모델링 통합정보 .fbx or .blender 10,000 63.3 GB 3D 모델링 메시정보 .obj 10,000 434.76 GB 3D 모델링 텍스처 .mtl or .png 15,365 16.18 GB 2D 랜더링 데이터 구축 규모과제명 데이터 설명 데이터 형식 파일 수 전체 용량 3D 에셋-사물 모델링 이미지 쌍 데이터 2D 랜더링 Depth .png 240,000 9.33 GB 2D 랜더링 Mask .png 240,000 6.86 GB 2D 랜더링 Normal .png 240,000 16.05 GB 2D 랜더링 RGB .png 240,000 18.11 GB 라벨링 데이터 구축 규모
과제명 데이터 설명 데이터 형식 파일 수 전체 용량 3D 에셋-사물 모델링 이미지 쌍 데이터 3D 모델링 라벨 .json 10,000 7.04 MB 카메라 속성 라벨 .json 10,000 865.85 MB 경로 라벨 .json 10,000 93.05 MB 데이터 분포
항목명 분포 클래스 난이도 분포 난이도 비율 최하 25% 하 50% 중 12% 상 6% 최상 7% 객체 사이즈 분포 사이즈 범위 비율 1 0~ 150mm 19% 2 150~400mm 31% 3 400~750mm 18% 4 750~1500mm 21% 5 1500~2500mm 12% 클래스별 분포
(Level 1)category 비율 Portable Object 66% Non-Portable Object 34% 클래스별 분포
(Level 2)meta name 비율 문구(21) 5.20% 주방용품(17) 4.20% 용기(29) 7.20% 공구(21) 5.20% 장난감(25) 6.20% 화장품/미용(14) 3.50% 소형 전자제품(45) 11.20% 과일/음식(18) 4.50% 악기(15) 3.70% 의료용품(6) 1.50% 운동용품(29) 7.20% 의류(24) 6.00% 운동기구(20) 5.00% 의자(11) 2.70% 식탁(13) 3.20% 쇼파(14) 3.50% 조명(13) 3.20% 대형 전자제품(30) 7.40% 수납(15) 3.70% 침대(6) 1.50% 주방(11) 2.70% 화장실(6) 1.50% 객체(object) 분포 클래스(Level 3)별 19-25개 3D 에셋 -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드
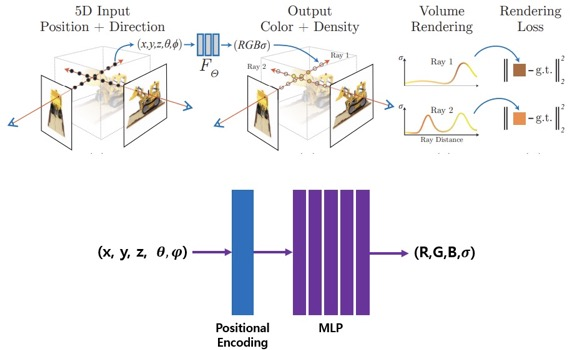
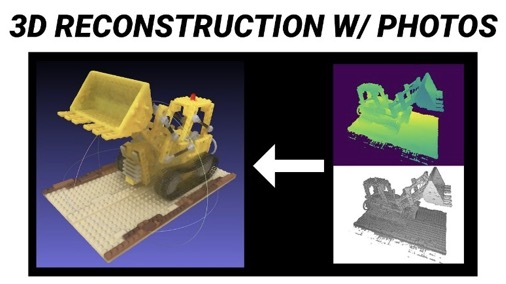
1.최근 2D 이미지로부터 3D로 변환 해주는 방법인 Novel View Synthesis는 주목받는 연구 분야 중 하나임
2.NeRF(Neural Radiance Field)는 2020 ECCV ORAL Best Paper로 언급되면서 사람들로부터 뜨거운 관심
3.NeRF는 수많은 파생연구들의 대표 베이스라인 모델로서 활용성이 높음
4.이 모델은 데이터셋으로 시점의 카메라의 정보, 시점에서 바라본 RGB이미지가 사용됨
5.구축되는 원천데이터 24개 시점 이미지, 가공데이터의 카메라 정보를 활용할 수 있음

(1) 사용 데이터셋 :
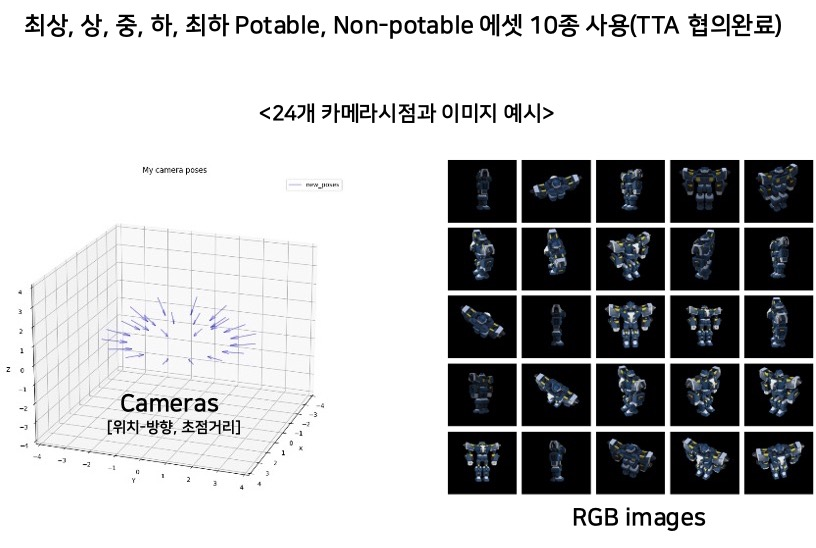
- View Synthesis 모델은 타겟 에셋에 대한 24개의 시점에 해당하는 이미지를 학습하면 새로운 시점에 대한 이미지를 예측할 수 있음.
- 최상, 상, 중, 하, 최하 난이도의 Potable, Non-Potable 3D 에셋 데이터를 샘플링하여 총 10종 데이터셋을 학습한 10개의 NeRF 모델을 구축함
- 각 에셋 별로 22장을 학습에 사용하고 1장은 검증 1장은 테스트에 사용하여 학습 결과의 유효성 검증을 진행함.
(2) 개발환경 및 소스코드 :
- 도커파일 제공하여 사용자가 동일한 개발환경을 사용할 수 있게 함.
- 파이썬 명령어로 모델 학습 및 테스트 가능 할 수 있도록 함.
- 해당 내용은 메뉴얼로 작성하여 AI 허브및 깃허브 레포지토리에 공개하였음.
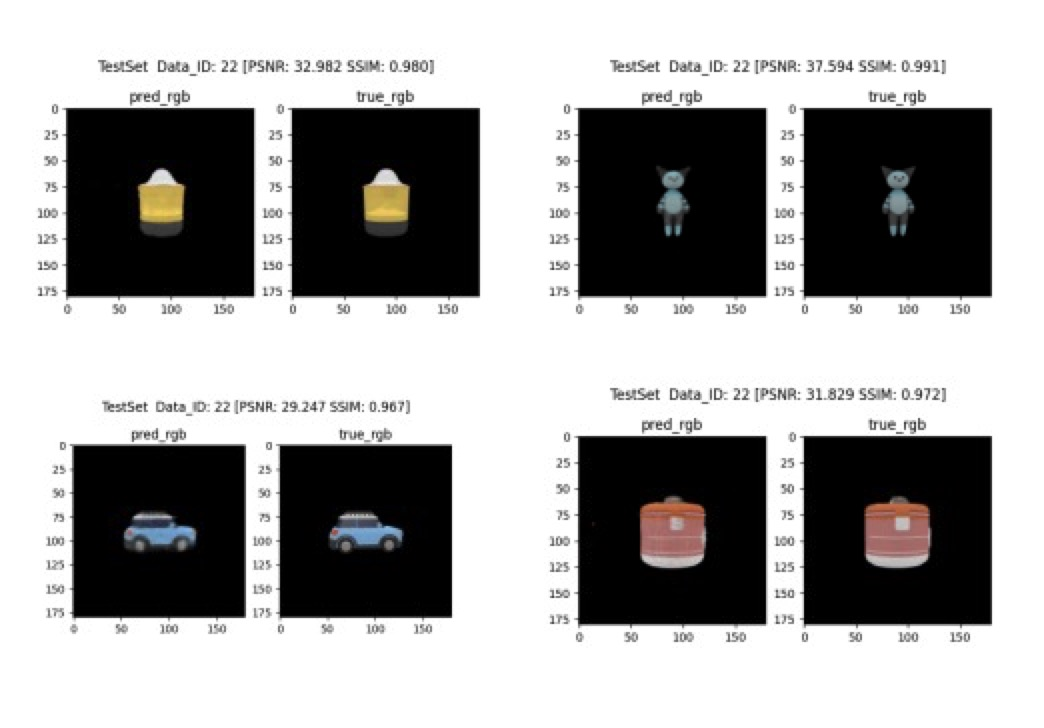
(3) 개발결과
- 개발결과는 평균 PSNR 28.9 SSIM 0.97 기록하여 각 기준치 159%, 121% 초과달성함
-
데이터 성능 점수
측정값 (%)기준값 (%)데이터 성능 지표
데이터 성능 지표 번호 측정항목 AI TASK 학습모델 지표명 기준값 점수 측정값 점수 1 View Synthesis 성능 Image Synthesis CUDA 11.3, NVIDIA Driver Version: 470.141.10 PSNR 18.11 dB 28.8 dB 2 View Synthesis 성능 Image Synthesis CUDA 11.3, NVIDIA Driver Version: 470.141.10 SSIM 0.8 단위없음 0.96 단위없음
※ 데이터 성능 지표가 여러 개일 경우 각 항목을 클릭하면 해당 지표의 값이 그래프에 표기됩니다.
※ AI모델 평가 지표에 따라 측정값의 범위, 판단 기준이 달라질 수 있습니다. (ex. 오류율의 경우, 낮을수록 좋은 성능을 내는 것으로 평가됩니다)
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드데이터 포맷
예시 데이터 항목 Json 형식 3D 모델링 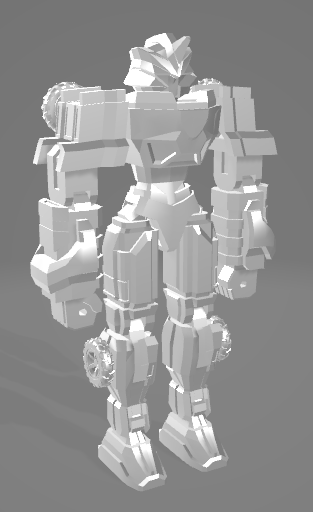
통합정보
(.fbx)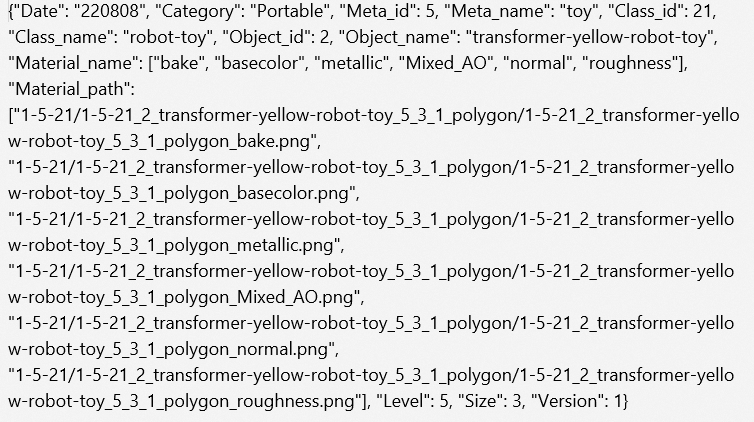
3D 모델링 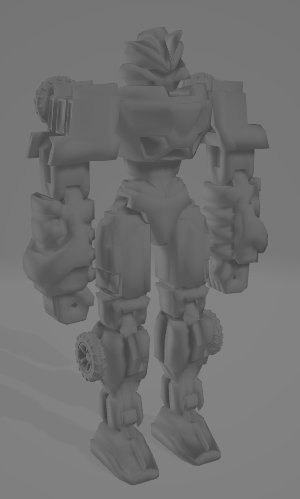
메시
(.obj)2D 텍스처 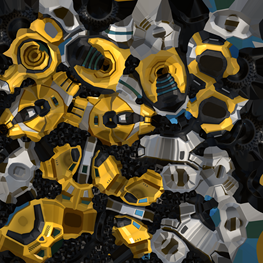
텍스쳐
(.mtl
or
.png)2D 이미지
(1920 * 1080)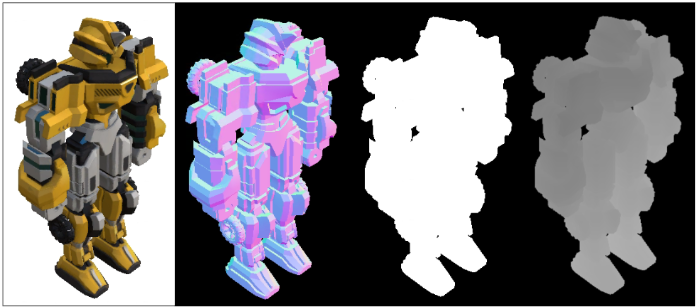
렌더링 이미지
(.png)데이터 폴더 구성 – 원천 데이터
Depth Field Name Length Meaning 1 Class 402 402개의 서로 다른 종류의 클래스 폴더 2 Asset at most 25 25개의 서로 다른 종류의 에셋 폴더 3-1 Rendering 4 4종의 렌더링 이미지 폴더 3-2 Modeling at least 3 obj, fbx, mtl, png 등 3D 에셋 모델링 관련 데이터 파일 4 View Point 24 24개의 서로 다른 시점의 이미지 
데이터 폴더 구성 – 라벨링 데이터
Depth Field Name Length Meaning 1 Class 402 402개의 서로 다른 종류의 클래스 폴더 2 Asset at most 25 25개의 서로 다른 종류의 에셋 폴더 3 Metadata 3 3종의 Json 파일 
파일명 설명
파일명 예시 1-1-1_2_25mm-Masking-Tape_1_1_1_nurbs 2001-01-01 category, meta, class id가 합쳐진 번호 2 object id 25mm-Masking-Tape 물체의 특징을 묘사한 물체 명 1 난이도 (5: 최상, 4: 상, 3: 중, 2: 하, 1: 최하) 1 크기 (5: 1500~2500mm, 4: 750~1500mm, 3: 400~750mm, 2: 150~400mm, 1: 0~150mm) 1 버전 (검수 받은 횟수) nurbs/polygon nurbs 모델링 또는 polygon 모델링 클래스 리스트
메타ID 메타클래스 세부 클래스 레벨1
(클래스수)레벨2
(클래스수)1 Portable
(263)문구
(21)테이프 명함꽂이 책 꽂이 독서대 필기구 펜꽂이 인센스 홀더 커터칼 캔들워머 향초 디퓨저 클립 가위 서류철 스테이플러 이어폰 필통 연필깍이 자 지우개 저장장치 2 주방용품
(17)접시 밀크캔 컵 그릇 오프너 칵테일 쉐이커 코르크 스크루 후라이팬 국자 주전자 소금, 후추 그라인더 주걱 물병 음료병 칼 식기 비커 3 용기
(29)소스 통 화장품 통(스킨, 로션) 샴푸 통 도시락 통 페트병 실험 장비 도자기 우유용기 코카콜라 병 컵라면 용기 보온병 수통 아이스박스 공구 케이스 플라스틱 백 밀폐용기 냄비 약 통 바구니 정리함 휴지통 재활용 상자 나무 상자 장독대 류 우산꽂이 보물상자 선물상자 화병 화분 4 공구
(21)렌치 볼트/너트 핀셋 제초기 맥가이버 칼 니퍼 톱 펌프 용접기 사다리 무빙카트 도끼 전기톱 망치 헬멧 드릴 스크루드라이버 체 멀티탭 쇠줄 나사 5 장난감
(25)동물 모양 장난감 레고(사람 모형) 게임기 성 콩콩이, 킥보드 기차 주방놀이 블록 레고 모빌 바비 인형 오뚜기 보드게임 붕붕카 장난감 칼 뜨개질 인형 파티용품 피젯스피너 도형퍼즐 모래시계 로봇 공룡 장난감 자동차 장난감 배 장난감 항공기 6 화장품/미용
(14)립스틱 치약 칫솔 헤어집게 비누 메이크업 브러쉬 빗 무스/왁스 립밤 인공 눈물 크림 파우더 향수 헤어 스프레이 7 소형 전자제품
(45)키보드 재봉틀 고데기 다리미 저울 무선 청소기 소형 냉장고 포트 공기청정기 로봇청소기 안마기 음식물 계산기 면도기 커피 캡슐 정수기 처리기 가습기 에어 프라이어 믹서기 착즙기 전기밥솥 빔 프로젝터 전화기 태블릿PC 헤드폰 컴퓨터 부품 액자 탁상시계 캡슐 커피 머신 마우스 전자 시계 전자레인지 마이크 테이프 플레이어 아이팟 헤어 드라이기 토스터 커피머신 선풍기 노트북 물비누 통 와플 메이커 리모컨 청소기 벽시계 8 과일/음식
(18)사과 베이글 바나나 부리또 오이 무화과 햄버거 핫도그 레몬 오렌지 파인애플 피자 석류 막대 아이스크림 프레젤 딸기 과자 팝콘 9 악기
(15)아코디언 벤조 첼로 드럼 플룻 호른 기타 하프 마라카스 오보에 피아노 색소폰 바이올린 트럼본 트럼펫 10 의료용품
(6)데일밴드 목 기브스 목발 들것 주사기 청진기 11 운동용품
(28)농구공 활 총 보드 스케이트 필라테스 소도구 축구화 지팡이 장갑 수경 낚시대 채 과녁 스노클링 기구 스포츠 고글 스포츠 보호장구 보드판 야구 글러브 야구공 크로켓공 골프공 탁구공 퍽 라켓 럭비공 축구공 테니스공 배구공 12 의류
(24)모자 크로스백 배낭 수영모 챙모자 넥타이 브래지어 기저귀 수영복 미니스커트 나비넥타이 지갑 선글라스 트렁크 수영복 마스크 잠옷 정장 샌들 운동화 청바지 가디건 안경 손목시계 운동 용품 가방 13 Non-Portable
(139)운동기구
(20)덤벨 스텝퍼 철봉 사이클 자전거 외발 자전거 네발 자전거 케틀벨 등산용품 전동 킥보드 훌라후프 트램펄린 줄넘기 체성분 측정 기계 전동 휠 무술용품(검/봉/곤/창) 승마운동기구 필라테스 바렐 샌드백 러닝머신 14 의자
(11)인테리어 의자 접이식 의자 흔들의자 스윙체어 바 의자 게이밍 의자 학원의자 좌식의자 스툴(원형) 스툴(사각형) 벤치 15 식탁
(13)화장대(모던) 화장대(엔틱) 책상(일자형) 책상(ㄱ, L자형) 스텐딩 책상 독서실 책상 베드테이블 쇼파테이블 좌식테이블 원형식탁 사각식탁 수영장 테이블 16 쇼파
(14)리클라이너(1인용) 리클라이너(3인용이상) 좌식쇼파 쇼파스툴 쇼파(엔틱) 쇼파(모던, 1인용, 다리 있음) 쇼파(모던, 1인용, 다리 없음) 쇼파(모던, 2인용, 다리 있음) 쇼파(모던, 2인용, 다리 없음) 쇼파(모던, 3인용, 일자형) 쇼파(모던, 3인용, ㄱ자형) 빈백 돌쇼파 벤치쇼파 17 조명
(13)단스탠드 장스탠드 벽등 샹들리에 야외조명(소형) 야외조명(대형) 독서등 천장등(매립등) 천장등(펜던트) 천장등(직부 조명) 전구 무드등 조명 갓 18 대형 전자제품
(30)티비 티비(장 스탠드) 모니터 소형 프린터 대형 복합기 3D 프린터 냉장고(1-door) 냉장고(2-door) 냉장고(4-door) 김치냉장고 쇼케이스 미니 세탁기 통돌이 세탁기 드럼 세탁기 스피커(바 형) 스피커(북쉘프타입) 스피커(스탠드) 포터블 스피커 식기 세척기 스타일러 벽걸이 에어컨 스탠드 에어컨 튀김기 민서기 의류 탈수기 신발 건조기 전신 건조기 보일러 디지털 도어록 펫 드라이룸 19 수납
(15)옷장 책장 서랍 선반 수납장 티비장 신발장 빨래건조대 서랍장 협탁 진열장 무지주 선반 옷걸이(바 형) 옷걸이(행거) 빨래바구니 20 침대
(6)2층침대 아기침대 접이식침대 돌침대 일반침대 패밀리침대 21 주방
(11)가스, 전기레인지 오븐 주방 후드 싱크볼 주방 수전 식기건조대 렌지대 도마거치대 칼거치대 와인냉장고 트롤리 22 화장실
(6)욕조 수도꼭지 샤워기 헤드 양변기 세면대 수건걸이 어노테이션 포맷
No. 항목 예시 한글명 영문명 1 모델링 정보 Property info 1-1 날짜 Date “220601” 1-2 카테고리 Category “Portable”
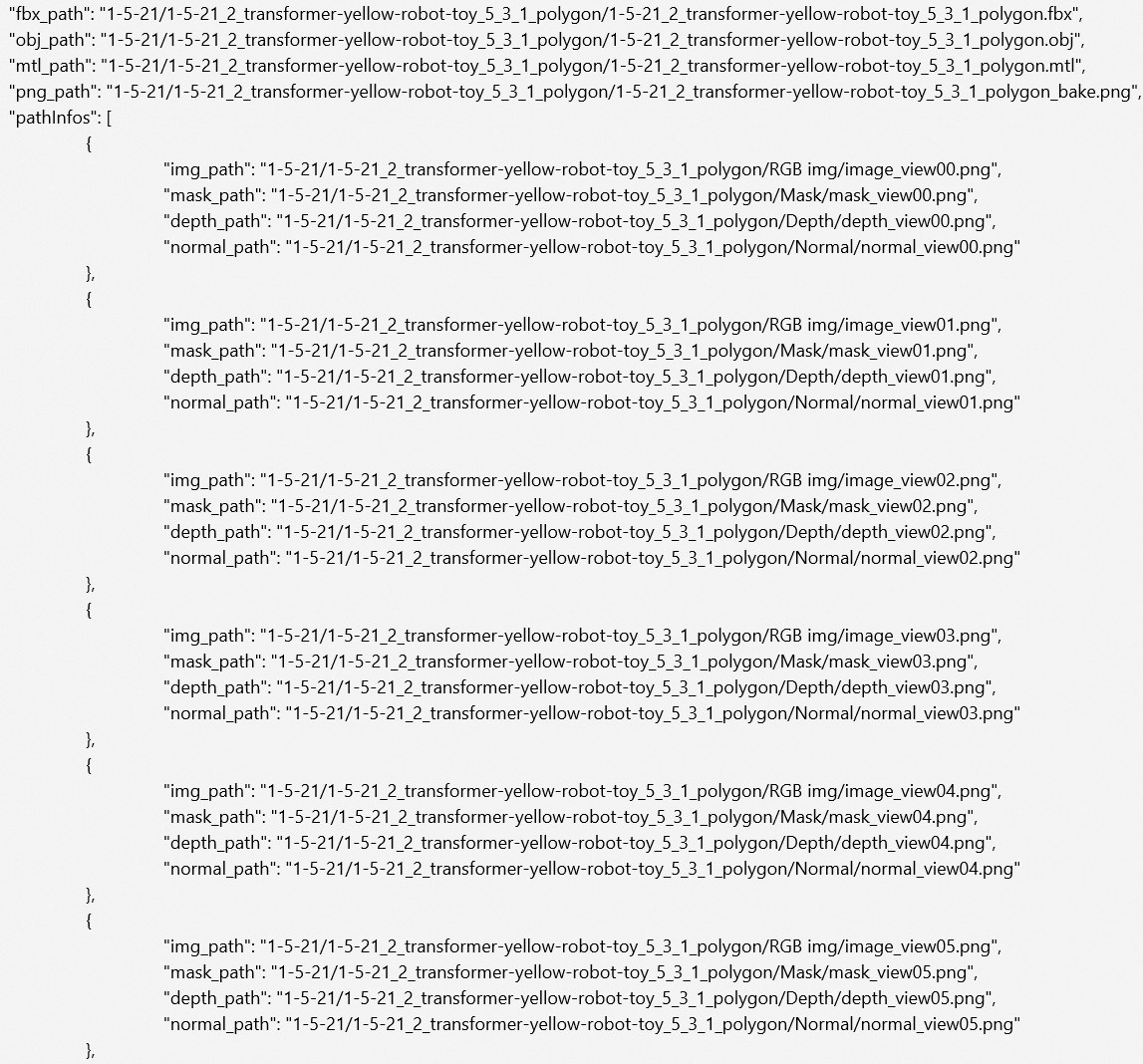
[“Portable” / “Non-Portable”]1-3 메타 클래스 아이디 Meta_id 5 [1-22] 1-4 메타 클래스 이름 Meta_name “stationery” 1-5 클래스 아이디 Class_id 20 [1-45] 1-6 클래스 이름 Class_name “tape” 1-7 객체 아이디 Object_id 20 [1-25] 1-8 객체 이름 Object_name “double_sided tape” 1-9 재질 이름 Material_name “metal” 1-10 재일 경로 Material_path “1-2-2/1-2-2_1_milk-can_2_2_1_polygon/1-2-2_1_milk-can_2_2_1_polygon_AO.png” 1-11 난이도 Level 3 [1-5] 1-12 크기 Size 2 [1-5] 1-13 모델링 버전 Version 1 [1-3] 2 카메라정보 Camera info 2-1 카메라번호 cameraId 0 [0-23] 2-2 이미지센서 종횡크기(mm) sensorSize_inMilimeters(x,y) {"x":36.0,"y":24.0} 2-3 x초점거리(pixel) x_focalLength_inPixels 1544.045 2-4 y초점거리(pixel) y_focalLength_inPixels 1158.033 2-5 카메라 x주점(pixel) x_principalPoint_inPixels 960 2-6 카메라 y주점(pixel) y_principalPoint_inPixels 540 2-7 시야각(화각) fieldOfView_inDegrees 50 2-8 초점거리(m) focalLength_inMilimeters 25.73 2-9 카메라 최단가시거리 near 1.5 2-10 카메라 최고가시거리 far 4 2-11 카메라 순서 depth -1 2-12 비율(종횡비) aspect 1.759 2-13 단위(m) unit “meter“ 2-14 유니티카메라속성(카메라종류) cameraType 1 2-15 유니티카메라속성(속성삭제여부) clearFlags 2 2-16 유니티카메라속성(뎁스텍스처 depthTextureMode 0 2-17 유니티카메라속성(랜더링디스플레이) targetDisplay 0 2-18 유니티카메라속성(랜더링직교성) orthographic FALSE 2-19 카메라위치 camera_position(x,y,z) {"x": 1.40,"y": 1.92,"z": 1.40} 2-20 에셋위치 asset_position(x,y,z) { "x": 0.0,"y": 0.05, "z": 0.0} 2-21 커메라회전각 좌표(quaternion) quaternion_rotation(x,y,z,w) {"x":-0.14,"y": 0.85,"z": -0.34,"w": -0.35} 2-22 커메라회전각 좌표(eulerAngle) eulerAngle_rotation(x,y,z) {"x": 44.0,"y": 225.0,"z": 0.0} 2-23 이동행렬 translation_matrix {"e00": 1.0,"e01": 0.0,"e02": 0.0,"e03": 1.40,"e10": 0.0,"e11": 1.0,"e12": 0.0,"e13": 1.87,"e20": 0.0,"e21": 0.0,"e22": 1.0,"e23": 1.40,"e30": 0.0,"e31": 0.0,"e32": 0.0,"e33": 1.0} 2-24 회전행렬 rotation_matrix {"e00": -0.70,"e01": -0.49,"e02": -0.50, "e03": 0.0,"e10": 1.49,"e11": 0.71,"e12": -0.69, "e13": 0.0,"e20": 0.70,"e21": -0.49,"e22": -0.50,"e23": 0.0,"e30": 0.0,"e31": 0.0,"e32": 0.0,"e33": 1.0} 2-25 투영행렬 RT_matrix {"e00": -0.70,"e01": -0.49,"e02": -0.50,"e03": 1.40,"e10": 1.49,"e11": 0.71,"e12": -0.69,"e13": 1.87,"e20": 0.70,"e21": -0.49,"e22": -0.50,"e23": 1.40,"e30": 0.0,"e31": 0.0,"e32": 0.0,"e33": 1.0} 3 경로정보 Path info 3-1 fbx 파일 경로 정보 fbx_path “1-4-4/1-4-4_4_big-red-lawn-mower_5_4_1_polygon/1-4-4_4_big-red-lawn-mower_5_4_1_polygon.fbx” 3-2 obj 파일 경로 정보 obj_path “1-4-4/1-4-4_4_big-red-lawn-mower_5_4_1_polygon/1-4-4_4_big-red-lawn-mower_5_4_1_polygon.obj” 3-3 mtl 파일 경로 정보 mtl_path “1-4-4/1-4-4_4_big-red-lawn-mower_5_4_1_polygon/1-4-4_4_big-red-lawn-mower_5_4_1_polygon.fbx”/1-4-4_4_big-red-lawn-mower_5_4_1_polygon.mtl” 3-4 texture 파일 경로 정보 png_path “1-4-4/1-4-4_4_big-red-lawn-mower_5_4_1_polygon/1-4-4_4_big-red-lawn-mower_5_4_1_polygon_bake.png” 3-5 RGB 파일 경로 정보 img_path “1-4-4/1-4-4_4_big-red-lawn-mower_5_4_1_polygon/RGB img/image_view00.png" 3-6 Mask 파일 경로 정보 mask_path “1-4-4/1-4-4_4_big-red-lawn-mower_5_4_1_polygon/Depth/depth_view00.png" 3-7 Depth 파일 경로 정보 depth_path “1-4-4/1-4-4_4_big-red-lawn-mower_5_4_1_polygon/Normal/normal_view01.png" 3-8 Normal 파일 경로 정보 normal_path “1-4-4/1-4-4_4_big-red-lawn-mower_5_4_1_polygon/Mask/mask_view01.png" 실제 예시
1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon
● 2D 이미지 가공 데이터
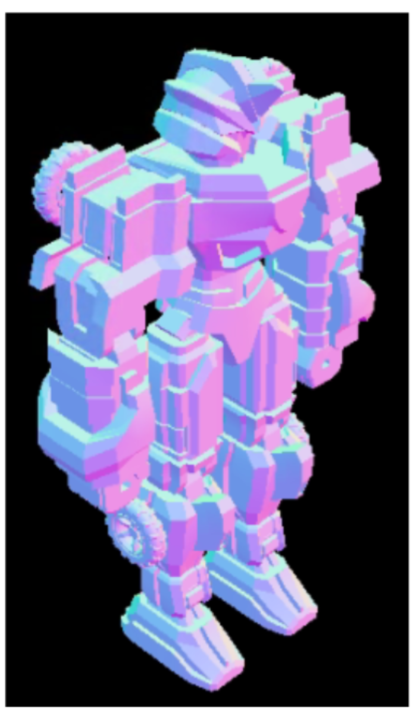


[다시점 이미지] [노말 이미지] [객체마스크 이미지] [뎁스 이미지] ● 어노테이션 데이터
[속성 정보]
1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon.json
{"Date": "220808", "Category": "Portable", "Meta_id": 5, "Meta_name": "toy", "Class_id": 21, "Class_name": "robot-toy", "Object_id": 2, "Object_name": "transformer-yellow-robot-toy", "Material_name": ["bake", "basecolor", "metallic", "Mixed_AO", "normal", "roughness"], "Material_path": ["captures/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon_bake.png", "captures/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon_basecolor.png", "captures/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon_metallic.png", "captures/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon_Mixed_AO.png", "captures/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon_normal.png", "captures/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon_roughness.png"], "Level": 5, "Size": 3, "Version": 1}
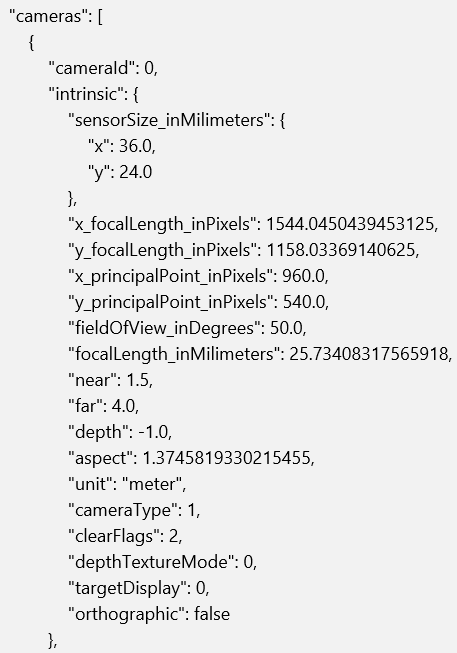
[카메라 정보](예시)1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon_camera.json
{ "cameras": [
{
"cameraId": 0,
"intrinsic": {
"sensorSize_inMilimeters": {
"x": 36.0,
"y": 24.0
},
"x_focalLength_inPixels": 1544.0450439453125,
"y_focalLength_inPixels": 1158.03369140625,
"x_principalPoint_inPixels": 960.0,
"y_principalPoint_inPixels": 540.0,
"fieldOfView_inDegrees": 50.0,
"focalLength_inMilimeters": 25.73408317565918,
"near": 1.5,
"far": 4.0,
"depth": -1.0,
"aspect": 1.3745819330215455,
"unit": "meter",
"cameraType": 1,
"clearFlags": 2,
"depthTextureMode": 0,
"targetDisplay": 0,
"orthographic": false
},
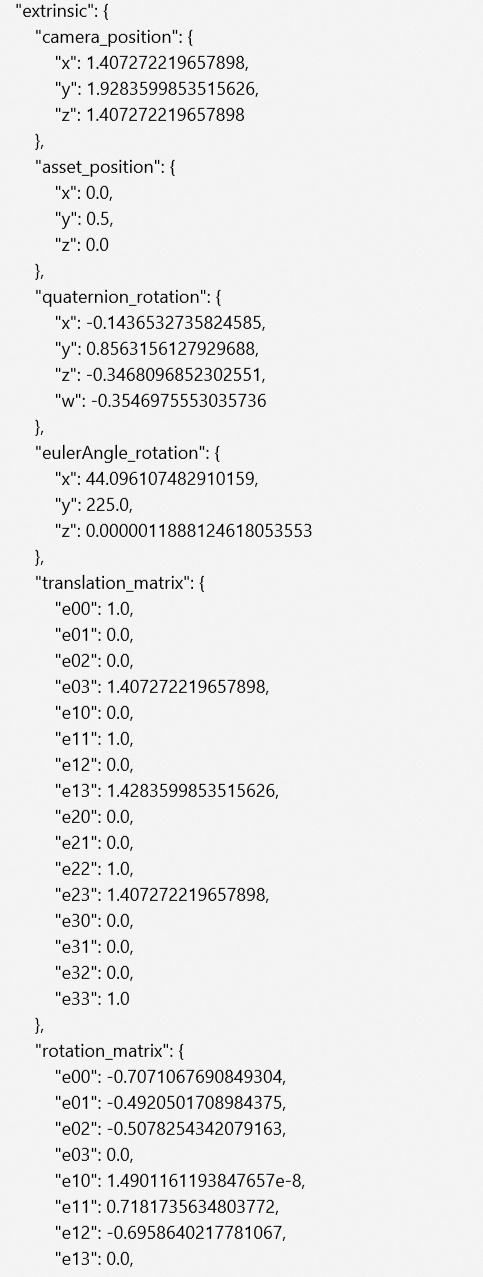
"extrinsic": {
"camera_position": {
"x": 1.407272219657898,
"y": 1.9283599853515626,
"z": 1.407272219657898
},
"asset_position": {
"x": 0.0,
"y": 0.5,
"z": 0.0
},
"quaternion_rotation": {
"x": -0.1436532735824585,
"y": 0.8563156127929688,
"z": -0.3468096852302551,
"w": -0.3546975553035736
},
"eulerAngle_rotation": {
"x": 44.096107482910159,
"y": 225.0,
"z": 0.0000011888124618053553
},
"translation_matrix": {
"e00": 1.0,
"e01": 0.0,
"e02": 0.0,
"e03": 1.407272219657898,
"e10": 0.0,
"e11": 1.0,
"e12": 0.0,
"e13": 1.4283599853515626,
"e20": 0.0,
"e21": 0.0,
"e22": 1.0,
"e23": 1.407272219657898,
"e30": 0.0,
"e31": 0.0,
"e32": 0.0,
"e33": 1.0
},
"rotation_matrix": {
"e00": -0.7071067690849304,
"e01": -0.4920501708984375,
"e02": -0.5078254342079163,
"e03": 0.0,
"e10": 1.4901161193847657e-8,
"e11": 0.7181735634803772,
"e12": -0.6958640217781067,
"e13": 0.0,
"e20": 0.7071067690849304,
"e21": -0.4920501410961151,
"e22": -0.5078253746032715,
"e23": 0.0,
"e30": 0.0,
"e31": 0.0,
"e32": 0.0,
"e33": 1.0
},
"RT_matrix": {
"e00": -0.7071068286895752,
"e01": -0.4920501708984375,
"e02": -0.5078254342079163,
"e03": 1.407272219657898,
"e10": 1.4901161193847657e-8,
"e11": 0.7181735634803772,
"e12": -0.6958640217781067,
"e13": 1.4283599853515626,
"e20": 0.7071067690849304,
"e21": -0.4920501410961151,
"e22": -0.5078253746032715,
"e23": 1.407272219657898,
"e30": 0.0,
"e31": 0.0,
"e32": 0.0,
"e33": 1.0
}
}
[파일 경로 정보](예시)
1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon_path.json{ "pathInfos": [
{
"obj_path": "captures/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon.fbx",
"img_path": "captures/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon/RGB img/image_view00.png",
"mask_path": "captures/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon/Mask/mask_view00.png",
"depth_path": "captures/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon/Depth/depth_view00.png",
"normal_path": "captures/220808_1-5-21_2_transformer-yellow-robot-toy_5_3_1_polygon/Normal/normal_view00.png"
}, -
데이터셋 구축 담당자
수행기관(주관) : 한국과학기술원
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 유소영, 권용민 042-864-2245 soyngyoo@kaist.ac.kr, kymin1002@kaist.ac.kr 데이터 관리, 3D 에셋 수집, AI 응용모델 수행기관(참여)
수행기관(참여) 기관명 담당업무 드림투리얼 데이터 정제, 가공, 검수 진행 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 유소영, 권용민 042-864-2245 soyngyoo@kaist.ac.kr, kymin1002@kaist.ac.kr
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.