-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.1 2022-09-14 원천데이터 수정 1.0 2022-07-28 데이터 최초 개방 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2022-10-20 신규 샘플데이터 개방 2022-07-28 콘텐츠 최초 등록 소개
물류창고 내 사고 및 위험 발생 가능성을 사전 파악할 수 있도록 작업환경 안의 각 객체에 대한 정보를 기반으로 하는 AI 학습용 데이터를 구축하고 대형화 및 고밀도화되는 분야로서 현장 작업자들의 안전과 효율적인 작업을 책임질 수 있는 AI 서비스 제공
구축목적
대형화 되는 물류센터, 창고 등 물류 관련 공간 내에서 발생하는 작업자들의 안전 사고 방지를 위한 서비스 개발
-
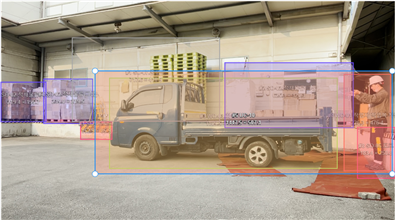
메타데이터 구조표 데이터 영역 재난안전환경 데이터 유형 이미지 데이터 형식 JPG 데이터 출처 14개 이상의 물류창고로부터 수집된 영상데이터 및 위험상황 시나리오 연출을 통해 제작된 영상데이터 라벨링 유형 바운딩박스, 폴리건 라벨링 형식 JSON 데이터 활용 서비스 물류창고 내 위험 상황 판단 데이터 구축년도/
데이터 구축량2021년/576,908 -
통계적 다양성 결과 (TTA 검증 결과)
- 이미지 당 객체 수
통계적 다양성 결과 (TTA 검증 결과) Annotation Type 이미지당 객체 수 Box, Polygon (Box, Polygon을 각각 하나의 객체로 산출) 7.3개 - Class당 객체 수
- 동적 및 정적 객체
Class_ID Class명 개수 비율 WO-01 작업자(작업복 착용) 535,554 13.81% WO-02 작업자(작업복 미 착용) 27,340 0.71% WO-03 화물트럭 150,767 3.89% WO-04 지게차 286,040 7.38% WO-05 핸드파레트카 34,856 0.90% WO-06 롤테이너 41,425 1.07% WO-07 운반수레 64,953 1.68% WO-08 흡연 9,507 0.25% SO-01 보관랙(선반) 159,762 4.12% SO-02 적재물류(그룹) 921,063 23.76% SO-03 물류(개별) 431,255 11.12% SO-06 도크 282,451 7.29% SO-07 출입문 435,659 11.24% SO-08 화물승강기 19,600 0.51% SO-09 차단멀티탭 3,519 0.09% SO-10 멀티탭 9,709 0.25% SO-11 개인 전열기구 8,946 0.23% SO-12 소화기 4,857 0.13% SO-13 작업 안전구역 38,290 0.99% SO-14 용접 작업 구역 21,135 0.55% SO-15 지게차 이동영역 102,096 2.63% SO-16 출입제한 구역 10,745 0.28% SO-17 화재 대피로 19,246 0.50% SO-18 안전펜스 87,754 2.26% SO-19 화기(용접기,토치) 22,136 0.57% SO-21 이물질(물,기름) 128,212 3.31% SO-22 가연물,인화물(목재,섬유,석유통) 10,713 0.28% SO-23 샌드위치판넬 9,266 0.23% 합계 3,876,856 100.00% 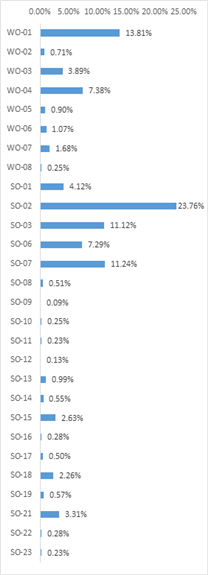
- 위험 상황 객체
Class_ID Class명 개수 비율 UA-01 지게차로 화물을 운반하는 경우 운전자 시야가 미확보된 상황 16,846 5.21% UA-02 지게차로 화물을 랙에 적재 시 주변에 장애물이 있는 상태 8,445 2.61% UA-03 3단 이상의 화물 보관 시 화물이 평치 적재된 상황 8,989 2.78% UA-04 화물이 랙에 보관된 경우에 화물의 적재상태 불량(상황태깅) 9,847 3.05% UA-05 운반수레, 롤테이너, 핸드파렛트카에 적재할 때 개별물류가 불안정하게 적재된 상황 8,973 2.78% UA-06 창고 내 화물을 운반할 때 (롤테이너, 운반수레, 핸드파렛트카)를 사용하는 경우에 화물이 붕괴된 상황 8,350 2.58% UA-10 창고 내 지게차 운반 작업 시 지게차 이동 통로에 사람이 있는 상황 12,151 3.76% UA-12 지게차의 이동 시 기본 안전수칙(포크에 사람 탑승 금지)을 미준수한 상황 8,780 2.72% UA-13 지게차로 화물 운반 시 화물의 적재상태 불량 및 붕괴된 상황 8,834 2.73% UA-14 창고 외부의 지게차 전용 작업구역 내에 작업자 있는 상황 8,580 2.66% UA-16 핸드파렛트카의 운반 장비에 대해서 2단 이상의 높이로 적재된 상황 9,782 3.03% UA-17 창고 내부의 개·보수 작업을 위한 용접작업 등 화기를 사용할 경우, 용접 작업구역 내 가연물 및 인화성 물질이 침범한 상황 8,645 2.68% UA-20 비 흡연 구역 내 흡연 하고 있는 상황 9,065 2.81% UC-02 지게차를 사용해서 입고 시 화물트럭의 화물칸에 작업자가 있는 상황 13,551 4.19% UC-06 지게차를 사용해서 출고 시 화물트럭의 화물칸에 작업자가 있는 상황 14,497 4.49% UC-08 창고 내에 지게차 이동통로가 테이프 및 페인트 등으로 표시되지 않은 상황 17,423 5.39% UC-09 입·출고 작업시 도크 출입문 앞에 장애물(적재물류)이 있는 상황(수정) 12,468 3.86% UC-10 도크 설비에 후진으로 차량 접차시 차량의 후방에 사람 있는 상황 17,077 5.29% UC-13 빈 파렛트의 보관상태 및 적치상태가 미정돈된 상황 8,550 2.65% UC-14 랙의 안전선 내부에서 랙에 기대어 있는 작업자 상황 9,261 2.87% UC-15 파렛트가 비틀림, 파손, 부식 된 상황 19,320 5.98% UC-16 화물 승강기 작업자가 탑승한 상황 13,607 4.21% UC-17 과부하 차단기 기능이 없는 멀티탭을 사용하는 상황 9,356 2.90% UC-18 소화기의 비치가 안되어 있는 상태 9,647 2.99% UC-19 출입제한 구역 출입문이 열린 상황 8,596 2.66% UC-20 화재 대피로내 적재물이 있는 상황 8,480 2.62% UC-21 도크에서 화물을 내리는 경우 화물트럭이 도크와 분리된 상황 16,284 5.04% UC-22 지게차가 이동 시 이동영역(안전선) 외부로 벗어나서 주행하는 상황 17,495 5.41% 합계 322,899 100% 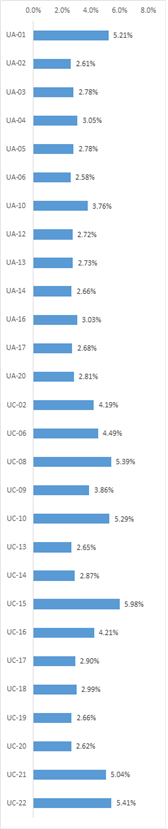
- 동적 및 정적 객체
창고 종류 분포 결과
창고종류 창고 ID 개수 비율 지표상
목표율보세창고 B 125,835 21.80% 5(20%) 냉동창고 F 54,489 9.45% 5(20%) 일반창고 G 396,584 68.73% 15(60%) 합계 576,908 100% 20(100%) 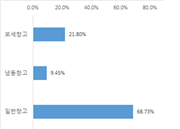
작업 공정별 분포 결과작업공정 종류 작업공정 ID 개수 비율 지표상
목표율입고 A 51,085 8.85% 8.60% 운반 B 43,312 7.51% 7.40% 보관 C 38,829 6.73% 6.80% 부가가치 서비스 D 25,421 4.41% 4.20% 피킹/분배 E 33,526 5.81% 5.80% 출고 F 39,844 6.91% 6.40% 지게차 H 114,048 19.77% 20.20% 도크설비 I 55,146 9.56% 10.00% 파렛트,렉 J 39,474 6.84% 6.80% 설비 및 장비 K 47,870 8.30% 7.80% 화재 L 88,353 15.31% 16.00% 합계 576,908 100% 100% 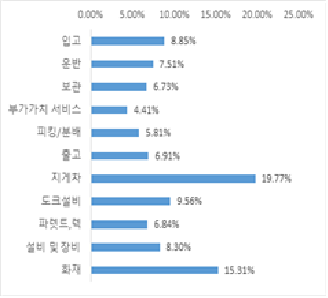
의미적 정확성 결과항목명 측정지표 전체대비 데이터 제출 비율(%) 샘플링 정보 샘플수 샘플링 비율(%) 도출 가능 여부 검사결과 바운딩박스(B-Box) F1-score 108.28 랜덤샘플링 1,600 0.28 모두확인 F1-score 97.53% 폴리곤(Polygon) F1-score 랜덤샘플링 모두확인 F1-score 94.77%
유효성 검사 결과항목명 측정지표 정량목표 검사 개수 검사결과 Bounding Box mAP 41.2% 이상 576,110 85.30% Polygon mAP 29.8% 이상 238,089 86.20% - 이미지 당 객체 수
-
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드대표성
- 여러 종류, 목적의 물류창고들을 선정하여 각 창고별로 수집되어 질 수 있는 클래스와 시나리오를 작성하여 데이터 구성
독립성
- NIA에 공개되어 있는 다른 과제들과 중복되지 않도록 시나리오 구성
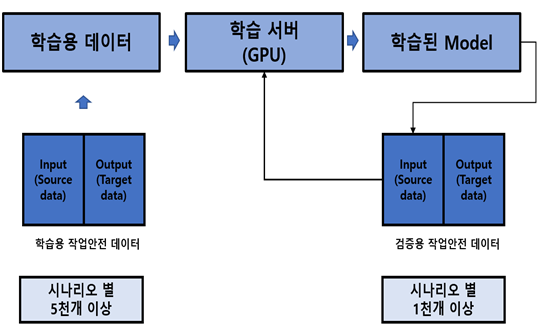
모델 학습
- Box, Polygon 모두 위험 상황 인지가 들어가는 것이 포인트이기 때문에 실시간에 최적화된 모델인 Yolo, Yolact 모델을 선정한다. 본 사업에서는 전체 50만장 이상의 데이터를 구축해야 하므로 각 train, val, test의 비율은 8:1:1로 구성하여 test에 5만장의 image 사용
대표성 구분 학습(Train) 검증(Validation) 시험(Test) 개요 – Box 작업에 해당하는 클래스와 시나리오 학습
– 학습용 서버를 활용하여 각 모델 학습 진행– 학습 도중 모델 성능 평가 및 비교
– 각 클래스 별 AP, mAP 수치 확인– 학습에서 사용되지 않은 이미지를 학습된 가중치로 테스트
– 성능지표 확인필요 데이터 – 많을수록 좋음(Overfitting 유의)
– 학습할 클래스를 고루 분포시켜야 함10%(최대 5만장) 10%(최대 5만장) * 물류창고 내 작업 안전 데이터 모델 개발 단계
- Box 모델 YOLO 기준(Yolact의 경우 세부 개수가 상이 전체 로직은 같은 구성
-
데이터 성능 점수
측정값 (%)기준값 (%)데이터 성능 지표
데이터 성능 지표 번호 측정항목 AI TASK 학습모델 지표명 기준값 점수 측정값 점수 1 객체 인식 (바운딩 박스) Object Detection YOLO mAP 41.2 % 85.3 % 2 객체 인식 (폴리곤) Object Detection Yolact mAP 29.8 % 86.2 %
※ 데이터 성능 지표가 여러 개일 경우 각 항목을 클릭하면 해당 지표의 값이 그래프에 표기됩니다.
※ AI모델 평가 지표에 따라 측정값의 범위, 판단 기준이 달라질 수 있습니다. (ex. 오류율의 경우, 낮을수록 좋은 성능을 내는 것으로 평가됩니다)
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드- 라벨링데이터 구성
분류 분류 속성명 속성 설명 데이터 필수 예시 타입 여부 Raw data Info. raw_data_ID 영상 파일명 string Y L-210501_G01_A_WS-01_001 location_ID 촬영장소 ID string Y G01 process_ID 공정ID string Y A situation_ID 상황ID string Y WS-01 situation_description 상황서술 string Y 차량에서 화물 내릴 장소의 바닥에 이물질 및 오염상태 copyrighter 수행기관명 string Y (주)미디어그룹사람과숲 resolution 해상도 array Y [1920, 1080] date 촬영일자 string Y 2021-05-01 start_time 촬영 시작시간 string Y 16:00:02 end_time 촬영 종료시간 string Y 16:03:02 length 영상길이 초(sec) string Y 180 lux 촬영 장소 밝기 Level integer Y 75 fps 30fps Integer Y 30 f_stop 조리개 수치 Integer N F/8.0 exposure_time 노출시간 Integer N 1/80 device CCTV/카메라 Integer Y 0~1 file_extension 동영상 확장자 string Y mp4 Source data Info. source_data_ID 이미지 파일명 string Y L-210501_G01_A_WS-01_001_0001 file_extension 이미지 확장자 string Y jpg Learning data info. path 이미지 폴더명 string Y /작업환경/보세창고/운반/불안전상황(UC) json_data_ID Json 파일명 string Y L-210501_G01_A_WS-01_001_0001 File extension Json 확장자 string Y json annotation class_ID 객체 클래스 id string Y WO-01 type 어노테이션 종류 string Y box, polygon Bbox [x,y,w,h] array N [593,671,400,300] polygon [x,y,x,y,x,y,x,y,x,y,x,y] array N [93,71,140,695,1040,795,1140,895] - 라벨링데이터 실제 예시
{
"Raw data Info.": {
"raw_data_ID": "L-211211_G18_I_UC-11_002",
"location_ID": "G18",
"process_ID": "I",
"situation_ID": "UC-11",
"situation_description": "지게차가 미끄러지지 않도록 도크 바닥에 이물질이 있는 상태",
"copyrighter": "㈜미디어그룹사람과숲",
"resolution": [
1920,
1080
],
"date": "2021-12-15",
"start_time": "12:33:00",
"end_time": "12:38:30",
"length": "330",
"lux": 750,
"fps": 30,
"f-stop": "F/12",
"exposure_time": "1/120",
"device": 1,
"file_extension": "mp4"
},
"Source data Info.": {
"source_data_ID": "L-211211_G18_I_UC-11_002_0237",
"file_extension": "jpg"
},
"Learning data info.": {
"path": "./labels",
"json_data_ID": "L-211211_G18_I_UC-11_002_0237",
"file_extension": "json",
"annotation": [
{
"class_id": "SO-02",
"type": "box",
"coord": [
636.36364987379,
314.93,
291.30015009651,
417.99609988741
]
},
{
"class_id": "WO-01",
"type": "box",
"coord": [
1150.0128966115,
266.80813449012,
137.87710338851,
145.61186550988
]
},
{
"class_id": "WO-04",
"type": "box",
"coord": [
634.94131164466,
73.26607429064,
707.90626979889,
658.87939701231
]
},
{
"class_id": "SO-06",
"type": "box",
"coord": [
0,
559.73063389031,
1920,
471.64793780468
]
},
{
"class_id": "SO-21",
"type": "box",
"coord": [
270.32121317451,
682.56593616123,
228.34759788297,
85.11879922792
]
},
{
"class_id": "SO-07",
"type": "box",
"coord": [
375.97865509727,
0,
1544.0213449027,
671.80996892554
]
},
{
"class_id": "SO-21",
"type": "box",
"coord": [
1509.6876143114,
585.04233908328,
239.15796237711,
42.409294267481
]
}
]
}
}{{
"Raw data Info.": {
"raw_data_ID": "L-211211_G18_I_UC-11_002",
"location_ID": "G18",
"process_ID": "I",
"situation_ID": "UC-11",
"situation_description": "지게차가 미끄러지지 않도록 도크 바닥에 이물질이 있는 상태",
"copyrighter": "㈜미디어그룹사람과숲",
"resolution": [
1920,
1080
],
"date": "2021-12-15",
"start_time": "12:33:00",
"end_time": "12:38:30",
"length": "330",
"lux": 750,
"fps": 30,
"f-stop": "F/12",
"exposure_time": "1/120",
"device": 1,
"file_extension": "mp4"
},
"Source data Info.": {
"source_data_ID": "L-211211_G18_I_UC-11_002_0237",
"file_extension": "jpg"
},
"Learning data info.": {
"path": "./labels",
"json_data_ID": "L-211211_G18_I_UC-11_002_0237",
"file_extension": "json",
"annotation": [
{
"class_id": "SO-02",
"type": "box",
"coord": [
636.36364987379,
314.93,
291.30015009651,
417.99609988741
]
},
{
"class_id": "WO-01",
"type": "box",
"coord": [
1150.0128966115,
266.80813449012,
137.87710338851,
145.61186550988
]
},
{
"class_id": "WO-04",
"type": "box",
"coord": [
634.94131164466,
73.26607429064,
707.90626979889,
658.87939701231
]
},
{
"class_id": "SO-06",
"type": "box",
"coord": [
0,
559.73063389031,
1920,
471.64793780468
]
},
{
"class_id": "SO-21",
"type": "box",
"coord": [
270.32121317451,
682.56593616123,
228.34759788297,
85.11879922792
]
},
{
"class_id": "SO-07",
"type": "box",
"coord": [
375.97865509727,
0,
1544.0213449027,
671.80996892554
]
},
{
"class_id": "SO-21",
"type": "box",
"coord": [
1509.6876143114,
585.04233908328,
239.15796237711,
42.409294267481
]
}
]
}
}
- 라벨링데이터 구성
-
데이터셋 구축 담당자
수행기관(주관) : ㈜미디어그룹사람과숲
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 정용운 02-6959-6632 wjddyddns@humanf.co.kr · 사업총괄 · 데이터 품질 · 알고리즘 수행기관(참여)
수행기관(참여) 기관명 담당업무 링크플로우㈜ · 데이터 수집
· 데이터 정제㈜메트릭스 · 데이터 가공 지티원(주) · 데이터 품질
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.