-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.2 2024-11-28 라벨링데이터 수정 1.1 2023-07-17 원천데이터 수정 1.0 2021-06-18 데이터 최초 개방 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2024-06-28 산출물 수정 공개 AI모델 2023-04-12 메타데이터/세부데이터/데이터 통계/활용AI모델 및 코드 내용 개정 2022-10-12 신규 샘플데이터 개방 소개
활주로에서 존재하는 이상객체(차, 상자, 비둘기, 사람)등의 인식을 위한 영상 데이터
- 데이터 영역 : 재난안전환경
- 데이터 유형 : 이미지
- 데이터 형식 : jpg
- 데이터 출처 : 직접취득
- 라벨링 유형 : 바운딩박스, 폴리곤, 키포인트
- 라벨링 형식 : JSON
- 데이터 활용 서비스 : 활주로 이상물체 감지 솔루션
- 구축년도 : 2020년
- 구축량 : 143만
구축목적
항공기 이/착륙과 관련한 안전사고 예방을 위해 공항 내, 특히 활주로에서 존재하는 이상객체 (지상 조업차량, 이동형 운반 차량, 화물 및 공구상자, 공항 활주로 주변의 철새들, 고라니와 같은 동물, 작업자 및 공항 근무자)등의 영상을 취득하여 이상 객체 인식 AI학습용데이터 구축
-
구축 내용 및 제공 데이터량
과제명 데이터 구축량 비고 영상/이미지 목표 수량 항공 활주로 데이터 이미지 2,000,000장 이상 BB 5,000,000 이상 BB 6,026,189 - 정성적 성과
정성적 성과 표 구분 성과기준(A) 결과(B) 달성률(B/A) 가공 Bounding Box 15,500,000 17,402,749 112.2% Polygon 240,000 339,118 141.2% Keypoint 120,000 120,051 100% 활용 활용모델/응용 서비스 개발(항공) mAP 41.2% 이상
(416 X 416기준)55.91% 135.7% 고용 신규 일자리 창출 360명 1762명 489.2% 청년 일자리 채용 360명 895명 248.6% - 항공 활주로 내 이상물체 감지를 위한 객체 데이터
항공 활주로 내 이상물체 감지를 위한 객체 데이터 표 데이터유형 단위 목표수량 달성수량 달성율 비고 이미지 장 2,000,000 2,032,530 100% Instance 개 5,000,000 6,026,189 100% Bounding Box 개 5,000,000 6,026,189 100% -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드• YOLOv4
< YOLOv4 구조 >
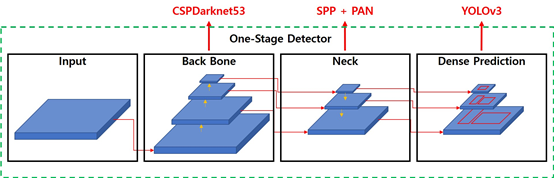
출처 : 논문 YOLOv4:Optimal Speed and Accuracy of Object Detection 2020.• YOLOv4의 장점
- input Resolution 개선 : 이전 버전 YOLO의 문제로 Small Object Detection에 취약한 문제가 있는데, 이를 해결하기 위해 Input Resolution을 기존 224, 256 등의 Resolution을 사용하였으나, YOLOv4에서는 Input Resolution을 416, 512, 608을 사용함.
- Receptive field 개선 : Base Layer 수를 늘리고, 하나의 Image에서 다양한 종류 및 크기의 Object를 동시에 검출하기 위해 Parameter 수를 높임
- 속도 개선 : CSPNet 기반의 Backbone 설계로 속도를 향상시킴.• YOLOv4 Architecture
- YOLOv4 = YOLOv3 + CSPNet(CSPDarknet53) + SPP + PAN + BoF + BoS
- CSPNet : 추론을 위한 코스트를 완화시키면서도 정확도 손실을 최소화 할 수 있는 Cross Stage Partial Network 구조를 사용하였고, 학습 면에서는 gradient flow를 나누어 학습에 긍정적 영향을 미쳐 정확도 손실이 적음.
< CSPNet 구조 >
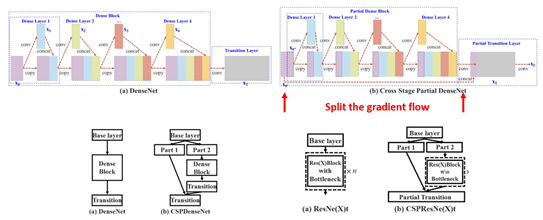
출처 : 논문 CSPNET: A NEW BACKBONE THAT CAN ENHANCE LEARNING CAPABILITY OF CNN 2019
- SPP : Spatial Pyramid Pooling을 통하여 다양한 스케일로부터 강인한 특징을 추출함.
< SPP 구조 >
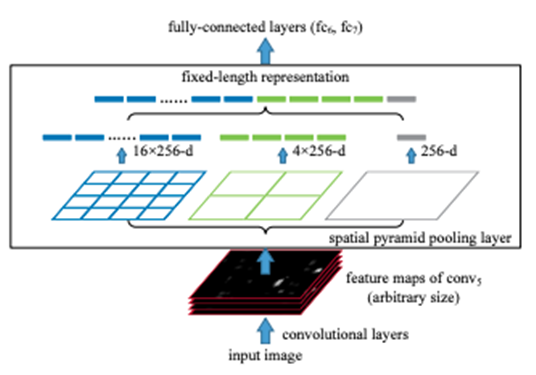
출처 : 논문 Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition, 2014.
- PAN : Path Augmentation > Pooling > Fusion의 단계로 처리됨.
(a) FPN backbone : 피라미드의 각 파란색 레이어는 도식으로 보면 한층 같지만 사실 ResNet-50 등으로 구성되어있기 때문에 도식의 붉은 점선의 경로대로 최하단 레이어가 최상위까지 도달하기 위해서는 굉장히 많은 수의 레이어를 지나가게 되고, 결과적으로 Propagate가 원활하게 이루어지지 못함.
(b) Bottom-up path augmentation : 간단한 Convolution 계층으로 이루어진 Nn 피라미드를 새로 구성하자는 접근법을 제안하였고, 이렇게 새로운 피라미드(주황색)를 만들 경우, 최하단 레이어가 최상단까지 도달하기 위해서는 녹색 점선처럼 Shortcut 하나와 몇 개의 Conv Layer들만 거치게 되고 기존 Backbone Model(ResNet-50 등)에 비해 원활한 Information Flow가 가능해짐. 모든 NN 레이어들은 Resolution은 다르지만 똑같이 256개의 필터를 가지며, NN-1을 Stride 2의 3x3 Convolution 연산으로 Downsampling한 결과를 Pn과 Concatenate 시켜 구현함.
(c) Adaptive feature pooling : Mask R-CNN에 사용된 ROIAlign 기법을 통해 각 NN마다 관심영역을 추출해낸다. Feature Map은 보통 최종 아웃풋의 Resolution 차이가 있기 때문에 Naive하게 ROI를 설정하면 아웃풋에 해당하는 정확한 Pixel과 불일치하는 문제가 발생할 수 있는데 이를 보정해주는 기법이 ROIAlign임. 다음으로 모든 Nn 레이어의 ROI를 Element-wise로 Pooling 해줌.
(d) Box Branch : Instance를 단순히 Box로 구분하고 싶다면 Pooling의 결과를 아래 도식과 같이 Fully-connected Layer로 연결해 예측하면 되고, Segmentation을 하려면 아래 방식을 적용하면 됨.
(e) Fully-connected fusion : 정확한 예측을 위해 Pooling 결과를 Conv Layer와 Fully-connected Layer로 분기시킨 뒤 융합시키는 방법으로, Conv Filter는 Spatial Information을, FC Layer는 공간정보는 없지만 풍부한 정보량을 가지고 있기 때문에, 이 둘을 Fusion시키면 더 정확한 예측이 가능함.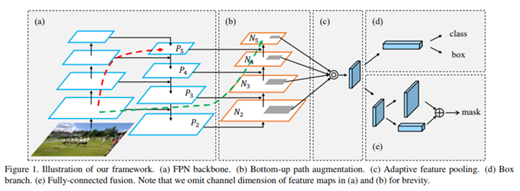
출처 : 논문 Path Aggregation Network for Instance Segmentation 2018.
- BoF : Data augmentation, Loss function, Regularization 등 학습에 관여하는 요소로, training cost를 증가시켜서 정확도를 높이는 방법
< BoF 구조 >
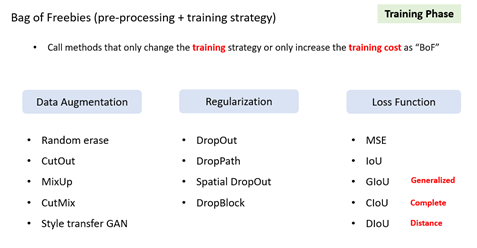
출처 : 논문 YOLOv4:Optimal Speed and Accuracy of Object Detection 2020.
- BoS : architecture 관점에서의 기법들이 주를 이루고, post processing도 포함이 되어 있으며, 오로지 inference cost만 증가시켜서 정확도를 높이는 기법
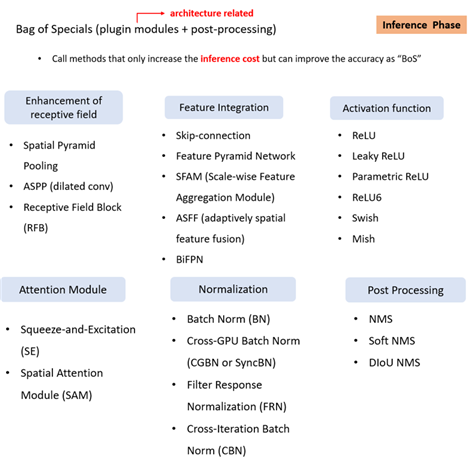
출처 : 논문 YOLOv4:Optimal Speed and Accuracy of Object Detection 2020.
-
데이터 성능 점수
측정값 (%)기준값 (%)데이터 성능 지표
데이터 성능 지표 번호 측정항목 AI TASK 학습모델 지표명 기준값 점수 측정값 점수 1 항공 활주로 이상객체 인식 Object Detection (1)Backbone(CSPDarknet53) -> (2)Neck(Spatial Pyramid Pooling) -> (3)DensePrediction(Anchor based predictor in YOLOV3) mAP 41.2 % 92 %
※ 데이터 성능 지표가 여러 개일 경우 각 항목을 클릭하면 해당 지표의 값이 그래프에 표기됩니다.
※ AI모델 평가 지표에 따라 측정값의 범위, 판단 기준이 달라질 수 있습니다. (ex. 오류율의 경우, 낮을수록 좋은 성능을 내는 것으로 평가됩니다)
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드구축 목적
- 항공기 이/착륙과 관련한 안전사고 예방을 위해 공항 내, 특히 활주로에서 존재하는 이상객체 (지상 조업차량, 이동형 운반 차량, 화물 및 공구상자, 공항 활주로 주변의 철새들, 고라니와 같은 동물, 작업자 및 공항 근무자)등의 영상을 취득하여 이상 객체 인식 AI학습용데이터 구축
활용 분야
- 공항 영상 내 존재하는 이상객체를 감지하는 인공지능 AI 알고리즘 개발연구
주요 키워드
- 산업안전, 항공 활주로 내 안전장비 인식 데이터셋
소개
- 공개된 양질의 공항 활주로 이상물체 감지 AI 학습용 데이터를 관련 기업, 대학/연구소 등이 활용하여 AI 알고리즘 수준 향상, 플랫폼 서비스 기술 등 원천 기술 확보 - 항공 활주로 내 이상물체 감지를 위한 객체 데이터

대표도면- 항공 활주로 내 이상물체 감지를 위한 객체 데이터


필요성
- 항공 활주로 내 이상물체 감지를 위한 객체 데이터
- 국민의 안전보장을 위한 위험객체 데이터 구축에 의한 위험상황 분석 필요
- AI 경쟁력의 핵심인 대규모 데이터를 단기간에 확보하여 AI 선도국가로 도약하는 한편, 일자리 창출과 경제성장 동력 확보 필요
- 크라우드소싱을 적용하여 일자리 창출은 물론, 국민 누구나 손쉽게 AI를 활용하여 새로운 비즈니스에 도전하고 전문가로 도약할 수 있는 기회 제공
데이터 구조
- 데이터 구조
데이터 구조 표 No. 항목명 설명 필수여부 1 date 촬영일자 Y 1-1 path Path정보 Y 1-2 filename 파일이름(*jpg) Y 1-3 copyrighter 저작권소유자 Y 1-4 H_DPI 수평 해상도 값 Y 1-5 location 촬영 장소 Y 1-6 bit 비트 수준 Y 1-7 V_DPI 수직 해상도 값 Y 1-8 resolution 이미지 해상도 Y 2 2-1 대분류 대분류 정보 Y 2-2 중분류 중분류 정보 Y 2-3 flags 겹침 및 잘림 여부 Y 2-4 box Bounding Box 좌표 Y 2-5 class Class 정보 Y - 데이터 셋(JSON 구조)
데이터셋(JSON 구조) 표 분류 항목 내용 값 범위 입력 방법 { “image”: { 이미지 정보 “filename”: “sample.JPG”, 파일명 파일명 입력 “copyrighter”: ”미디어그룹사람과숲 (컨 )”, 저작권 소유자 고정값 입력 “date”: ”2020.10.15”, 촬영 일시 폴더명 입력 “location” : “01” 촬영 장소 01~06 파일명에서 추출 S1-N 01 01M00001.JPG “H DPI”: ”72”, 수평 해상도 이미지 속성에서 추출 수평 해상도 “V DPI”: “72”, 수직 해상도 이미지 속성에서 추출 수직 해상도 “bit”: “24”, 비트 수준 이미지 속성에서 추출 비트 수준 “resolution”: [1920,1280]}, 이미지 해상도 이미지 속성에서 추출
- 어노테이션 포맷
어노테이션 포맷 표 항목 가공단위 가공방식 값 Tag name 항공기 객체 Bounding box
객체외곽을 Box로 가공
크라우드가 정의x,y 의 2개 point Bbox 활주로 객체 Bounding box
객체외곽을 Box로 가공
크라우드가 정의x,y 의 2개 point Bbox 동물 객체 Bounding box
객체 선을Point로 가공
크라우드가 정의x,y 의 array Bbox 사람 객체 Bounding box
객체외곽을 Box로 가공
크라우드가 정의x,y 의 2개 point Bbox 이상물체 객체 Bounding box
객체외곽을 Point로 가공
크라우드가 정의x,y 의 array Bbox
-
데이터셋 구축 담당자
수행기관(주관) : 미디어그룹사람과숲
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 성낙춘 02-6959-6632 sung_1973@humanf.co.kr · 사업관리 총괄 수행기관(참여)
수행기관(참여) 기관명 담당업무 아이브스(주) · 서비스 개발 (주)센스비전 · 데이터 수집, 정제 한서대 산학협력단 · 데이터 수집 (주)인피닉 · 플랫폼 운영 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 성낙춘(미디어그룹사람과숲) 02-6959-6632 sung_1973@humanf.co.kr
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.
오프라인 데이터 이용 안내
본 데이터는 K-ICT 빅데이터센터에서도 이용하실 수 있습니다.
다양한 데이터(미개방 데이터 포함)를 분석할 수 있는 오프라인 분석공간을 제공하고 있습니다.
데이터 안심구역 이용절차 및 신청은 K-ICT빅데이터센터 홈페이지를 참고하시기 바랍니다.

국방데이터 개방 안내
본 데이터는 국방데이터로 군사 보안에 따라 AI허브에서 데이터를 제공하지 않으며,
군 담당자를 통한 별도의 사용 신청이 필요합니다.