※ 26년 신규 개방되는 데이터로, 데이터 활용성 검토, 이용자 관점의 개선의견 수렴 등을 통해 수정/보완될 수 있으며 최종데이터, 샘플데이터, 산출물 등은 변경될 수 있습니다
-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.0 2026-05-19 데이터 개방 Beta Version 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2026-05-19 산출물 최종 공개 소개
실제 교통사고 기반 모사 및 교통사고 모델을 통해 생성된 엣지 시나리오 데이터 구축
구축목적
교통사고 사전 예측 및 일반 학습 데이터로 포착하기 어려운 엣지 시나리오에 대한 AI 대응능력 강화
-
메타데이터 구조표 데이터 영역 교통물류 데이터 유형 3D , 텍스트 데이터 형식 - 원천1 3D 에셋 데이터 : obj - 원천2 실제 교통사고 모사 데이터 : pro, xodr, xosc -가공 합성 교통사고 모사 데이터 : pro, xodr, xosc 데이터 출처 자체 수집 라벨링 유형 - 시뮬레이션: 3D, Pc-crash 교통사고 합성 시뮬레이션 - 텍스트 OpenDrive 정적 객체 매핑 - 텍스트 OpenScenario 동적 정보 매핑 라벨링 형식 pro, xodr, xosc 데이터 활용 서비스 사고 예측, 사고 위험도 분석, 교통 안전 계획 데이터 구축년도/
데이터 구축량2025년/- 원천1 3D 에셋 데이터 : 300건(파일수 1,370개) - 원천2 실제 교통사고 모사 데이터 : 500건(파일수 1,500개) - 가공 합성 교통사고 모사 데이터 : 300건(파일수 900개) ※원천데이터 및 가공데이터의 데이터는 여러개의 파일로 구성되어 있음 -
■ 데이터 구축 규모
■ 데이터 구축 규모 데이터 종류 데이터 형태 어노테이션
규모결과물
규모교통사고
모사 데이터원천1 3D 에셋 데이터 3D 에셋 - 300건 원천2 실제 교통사고 모사 데이터 시뮬레이션 - 500건 XML(xodr) 500건 500건 XML(xosc) 500건 500건 라벨링 합성 교통사고 모사 데이터 시뮬레이션 - 300건 XML(xodr) 300건 300건 XML(xosc) 300건 300건 메타 실제 교통사고 모사 메타 데이터 XML 500건 800건 합성 교통사고 모사 메타 데이터 XML 300건 ■ 데이터 분포 (원천1/3D에셋 데이터)
■ 데이터 분포 (원천1/3D에셋 데이터) 대분류 객체 수 비율 차량모델 75 25.00% 보행자모델 75 25.00% PM모델 30 10.00% 환경모델 60 20.00% 시설물모델 60 20.00% 합계 300 100% ■ 데이터 분포 (원천2/교통사고 모사 데이터)
- 사고 지역■ 데이터 분포 (원천2/교통사고 모사 데이터) - 사고 지역 사고 지역 count 비율 고속도로 43 8.60% 도심로 323 64.60% 이면도로 134 26.80% 합계 500 100% - 충돌 유형
■ 데이터 분포 (원천2/교통사고 모사 데이터) - 충돌 유형 유형 count 비율 차대사람_횡단중 48 9.60% 차대사람_기타 38 7.60% 차대차_정면충돌 54 10.80% 차대차_측면충돌 46 9.20% 차대차_측면접촉 105 21.00% 차대차_추돌 98 19.60% 차대이륜 50 10.00% 이륜대이륜 15 3.00% 차량단독_충돌 30 6.00% 차량단독_기타 16 3.20% 합계 500 100% - 사고 대상 나이
■ 데이터 분포 (원천2/교통사고 모사 데이터) - 사고 대상 나이 사고대상(1당) 나이 count 비율 30세 이하 89 17.80% 31 ~ 40세 92 18.40% 41 ~ 50세 107 21.40% 51 ~ 64세 122 24.40% 65세 이상 90 18.00% 합계 500 100% - 사고 대상 성별
■ 데이터 분포 (원천2/교통사고 모사 데이터) - 사고 대상 성별 사고대상(1당) 성별 count 비율 여성 130 26.00% 남성 370 74.00% 합계 500 100% ■ 데이터 분포 (라벨링/교통사고 모사(합성) 데이터)
- 사고 지역■ 데이터 분포 (라벨링/교통사고 모사(합성) 데이터) - 사고 지역 사고 지역 count 비율 고속도로 16 5.30% 도심로 244 81.30% 이면도로 40 13.30% 합계 300 100% - 충돌 유형
■ 데이터 분포 (라벨링/교통사고 모사(합성) 데이터) - 충돌 유형 유형 count 비율 차대사람_횡단중 4 1.30% 차대사람_기타 60 20.00% 차대차_정면충돌 18 6.00% 차대차_측면충돌 114 38.00% 차대차_측면접촉 18 6.00% 차대차_추돌 34 11.30% 차대이륜 32 10.70% 이륜대이륜 20 6.70% 차량단독_충돌 0 0.00% 차량단독_기타 0 0.00% 합계 300 100% - 사고 대상 나이
■ 데이터 분포 (라벨링/교통사고 모사(합성) 데이터) - 사고 대상 나이 사고대상(1당) 나이 count 비율 30세 이하 61 20.30% 31 ~ 40세 63 21.00% 41 ~ 50세 59 19.70% 51 ~ 64세 60 20.00% 65세 이상 57 19.00% 합계 300 100% - 사고 대상 성별
■ 데이터 분포 (라벨링/교통사고 모사(합성) 데이터) - 사고 대상 성별 사고대상(1당) 성별 count 비율 여성 94 31.30% 남성 206 68.70% 합계 300 100% -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드○ 임무 정의
- 사고 심각도 예측 모델 개발 : 사고 상황 시뮬레이션 정보(시공간 데이터), 환경 정보, 메타정보(차량 및 운전자 특성 등)를 입력받아 사고의 심각도를 5개 클래스(사망, 중상, 경상, 부상신고, 인피없음)로 정밀 분류 및 예측○ 임무 선정 사유
- 다양한 변수의 복합적인 상관관계 추출 : 사고 심각도는 단순 선형 관계가 아닌 도로 환경, 차량 스펙, 사고 시점의 동적 시뮬레이션 데이터가 복잡하게 얽혀 결정되므로, 고차원의 특징(Featuere)간 관계를 효과적으로 학습할 수 있는 모델이 필수적임
- 유효성 검증의 핵심 지표 : 구축된 시뮬레이션 및 환경 메타데이터가 실제 사고의 결과(심각도)를 얼마나 정확하게 설명하는지 확인하여, 데이터의 정교함과 학습 가능성을 입증하기 위함○ 학습 모델 개발 환경
○ 학습 모델 개발 환경 개발 환경 내용 학습 환경 Ubuntu 22.04.4 LTS, Python (Python 3.10.12), Pytorch 2.5.1 모델 및 리소스 자원 환경 NVIDIA-H200 GPU, Intel® Xeon® Platinum 8480+ 2G 를 활용한 고성능 연산 환경 구축 모델 개발 전략 초기 기획 단계의 LSTM+Transformer하이브리드 구조에서 데이터 병렬 처리 효율과 장기의존성(Long-range dependency)파악 성능이 우수한 Transformer Encoder중심의 커스텀 모델로 최적화 하여 개발 진행 성능 지표 검증 정확도(Accuracy) 85% 및 F-1 score 0.80이상의 목표를 설정하고, 최종 결과에서 이를 상회하는 모델을 선정 ○ 최종 선정 모델
1) 선정 모델 : Transformer-Encoder-based Custom Model
2) 선정 배경 : LSTM 방식은 데이터처리가 순차적으로 이루어지므로 연산 속도가 느리고, 과거정보 소실(Vanishing Gradient)의 우려가 있는 반면, Transformer Encoder는 Self-attention 매커니즘을 통해 사고 데이터내 다양한 변수 (속도, 충돌 각도 등)간의 상관 관계를 모든 시점에서 동시 분석할 수 있어 정밀한 예측이 가능함
3) 커스텀 설계 : 사고 시뮬레이션의 시계열 특성과 정적 메타데이터를 통합 입력받을 수 있도록 인코더 블록을 최적화 하고, 1,000 Epoch 의 집중학습을 통해 사고 유형별 미세한 특징 차이를 학습함
4) 기술적 장점
• 병렬 처리 최적화 : GPU자원을 최대한 활용하여 학습 속도를 개선
• 전역적 문맥 파악 : 사고 발생 전후 상황의 인과관계를 특정 시점에 국한하지 않고 전체 시퀀스 내에서 자유롭게 탐색○ 학습 데이터 생성 및 분류
1) 학습 데이터 전처리
• json 형식의 학습 데이터로부터 사고 심각도 관련 핵심 피처 추출
• 데이터 정규화 및 결측치 처리를 통해 학습 안정성 확보
2) 데이터 분류 및 비율
• 전체 데이터 활용 비율 : 100% (구축 데이터의 완전성 검증)
• 데이터 분할 : Train(80%) : Val(10%) : Test(10%) 비율을 구분하여 과적합을 방지하고 일반화 성능을 확보○ AI 모델 성능
○ AI 모델 성능 AI Task 알고리즘 데이터 수량 성능지표 목표 결과 총 구축량 데이터 수량(비율) 사고 심각도 분류 Transformer-Encoder-based Custom Model 실제 교통사고 모사 데이터 500건
합성 교통사고 모사 데이터 300건전체 데이터 100%
(8:1:1분할)Accuracy 85% 이상 87.50% F-1 Score 0.8 이상 0.82 -
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드■ 데이터구성
○ 원천/라벨링 데이터 - OpenDrive 포맷■ 데이터구성 ○ 원천/라벨링 데이터 - OpenDrive 포맷 Key Type 필수
여부Description Child Type OpenDRIVE array Y OpenDRIVE 루트 요소 object header array Y 메타 정보 object revMajor string Y 표준 major 버전 revMinor string Y 표준 minor 버전 name string Y 도로 네트워크 이름 version string Y 파일 내부 버전 date string N 파일 생성일자 north number N 네트워크 북쪽 경계 south number N 네트워크 남쪽 경계 east number N 네트워크 동쪽 경계 west number N 네트워크 서쪽 경계 road array Y 도로 정의 object name string N 도로 이름 length number Y 도로 길이 (중심선 기준) id string Y 도로 ID junction string Y 교차로 ID, type array N object s number N type string N 도로 종류 planView array Y 도로 중심선 정의 object geometry array Y 중심선 geometry segment object s number Y 시작 위치 (s 좌표) x number Y 시작 x 좌표 y number Y 시작 y 좌표 hdg number Y heading(방향), 라디안 length number Y segment 길이 line|arc|spiral - Y 직선 도로 lanes array Y 차선 구성 object laneSection array Y 차선 구간 정의 object s number Y 구간 시작 위치 left array N 왼쪽 차선 그룹 object lane array N 개별 차선 정의 object id number Y 차선 ID type string Y driving, border 등 차선 유형 level boolean Y 도로와의 높이차 direction enum N 도로 방향 both, standard, reversed width array Y 차선 폭 정의 object sOffset number Y 차선 폭 정의가 시작되는 기준점 a number Y 시작 지점에서의 차선 폭 b number Y 도로 진행방향 s 에 따라 폭이 선형적으로 변하는 정도 c number Y 폭이 곡선 형태(포물선)으로 변하는 정도 d number Y 주로 도로 폭이 점점 변하거나 곡선 구간에서 사용 roadMark array N object sOffset number N 차선의 시작위치 type enum N 차선의 종류 none, solid, broken, solid solid, solid broken,broken solid, botts dot, curb, edge, grass, custom weight enum N 차선의 굵기 standard, bold color enum N 차선 색상 standard,white, yellow
red, blue, green, customwidth number N 차선 표시선의 물리적 굵기 (미터 단위) center array Y 중앙 차선 object lane array N object id number Y 차선 ID type string Y driving, border 등 차선 유형 level boolean Y 도로와의 높이차 direction enum N 도로 방향 both, standard, reversed roadMark array N object sOffset number N 차선의 시작위치 type enum N 차선의 종류 one, solid, broken, solid solid, solid broken,broken solid, botts dot, curb, edge, grass, custom weight enum N 차선의 굵기 standard, bold color enum N 차선 색상 standard,white, yellow
red, blue, green, customwidth number N 차선 표시선의 물리적 굵기 (미터 단위) right array N 오른쪽 차선 그룹 object lane array N 오른쪽 차선 object id number Y 차선 ID type string Y driving, border 등 차선 유형 level boolean Y 도로와의 높이차 direction enum N 도로 방향 both, standard, reversed width array Y 차선 폭 정의 object sOffset number Y 차선 폭 정의가 시작되는 기준점 a number Y 시작 지점에서의 차선 폭 b number Y 도로 진행방향 s 에 따라 폭이 선형적으로 변하는 정도 c number Y 폭이 곡선 형태(포물선)으로 변하는 정도 d number Y 주로 도로 폭이 점점 변하거나 곡선 구간에서 사용 roadMark array N object sOffset number N 차선의 시작위치 type enum N 차선의 종류 none, solid, broken, solid solid, solid broken,broken solid, botts dot, curb, edge, grass, custom weight enum N 차선의 굵기 standard, bold color enum N 차선 색상 standard,white, yellow
red, blue, green, customwidth number N 차선 표시선의 물리적 굵기 (미터 단위) link array N 도로가 앞뒤로 어떤 요소와 맞닿는지 정의 object successor array N 현재 도로의 끝 object elementType string N elementId string N contactPoint enum N end, start predecessor array N 현재 도로의 시작 object elementType string N elementId string N contactPoint enum N end, start objects array N 객체 정의 object object array N 객체 정의 object id string N 객체 id name string N 객체 이름 s number N 참조선 위치 t number N 잠조선 좌우 위치 zOffset number N 참조선 높이에서 추가 z오프셋 validLength number N hdg number N 각도 type string N 객체 유형 subtype string N 세부유형 length number N 외형 치수 길이 width number N 외형 치수 너비 height number N 외형 치수 높이 dynamic bool N 정적, 동적 orientation string N 도로의 진행방향 기준으로 물체의 전/후방 배치 의미 outlines array N 객체 외곽선 object outline array N object id string N 아이디 closed bool N 폐합 여부 outer bool N 바같 윤곽여부 fillType string N 채움타입 cornerLocal array N object id string N u number N 객체 로컬 평면좌표 v number N 객체 로컬 평면 좌표 dz number N 기준면에서 상대 높이 height number N cornerRoad array N object id string N s number N 객체 평면좌표 t number N 객체 평면 좌표 dz number N 기준면에서 상대 높이 height number N junction array N 교차로 object id string N 교차로 아이디 name string N 교차로 이름 type enum N direct, default, virtual connection array N 접속관계 object id string N connection의 식별자 incomingRoad string N 접근 road id connectingRoad string N 접속용 road id contactPoint enum N start, end laneLink array N 차선 단위 연결 규칙 object from number N 들어오는 차선 id to number N 연결될 차선 id elevationProfile array N object elevation array N object s number N a number N b number N c number N d number N ○ 원천/라벨링 데이터 - OpenScenario 포맷
■ 데이터구성 ○ 원천/라벨링 데이터 - OpenScenario 포맷 Key Type 필수
여부
Description Child Type OpenSCENARIO array Y 시나리오 Root 노드 object FileHeader array Y 메타정보 섹션 object description string Y 시나리오 설명 텍스트 author string Y 작성자 이름 date string Y 생성 일자 ParameterDeclarations array N 전역 파라미터 선언 object ParameterDeclaration array N 개별 파라미터 정의 object name string N 파라미터 이름 parameterType enum N 파라미터 타입 integer, double, string, boolean, unsignedInt value string N 초기값 CatalogLocations array N 카탈로그 참조 섹션 object VehicleCatalogLocation 등 array N 차량/보행자 카탈로그 위치 object directory string Y 카탈로그 경로 RoadNetwork array Y 도로 네트워크 참조 object LogicFile array y object filepath string Y OpenDRIVE 파일 경로 SceneGraphFile array N object filepath string N 시각화 그래프 파일 경로 Entities array Y 등장 객체(차량, 보행자 등) object ScenarioObject array Y 단일 객체 정의 object name enum Y 객체 이름 car,truck,bus,pedestrian Vehicle / Pedestrian /MiscObject array Y 객체 종류 object name string N 객체이름 vehicleCategory / pedestrianCategory / miscObjectCategory enum Y 카테고리 car, truck, bus,pedestrian, pole, bus, motorbike, bicycle, train mass number N 객체 질량 BoundingBox array Y 객체 경계박스 object Center array Y object x number Y 경계박스 중심 x좌표 y number Y 경계박스 중심 y좌표 z number Y 경계박스 중심 z좌표 Dimensions array Y 객체 길이 object width number Y 객체 폭 length number Y 객체 길이 height number Y 객체 높이 Performance number N 차량 최대 값 maxSpeed number Y 차량 최대 속도 maxDeceleration number Y 차량 최대 감속도 maxAcceleration number Y 차량 최대 가속도 Axles array N object FrontAxle array Y 앞차축 정의 object maxSteering number Y 최대 조향각 (rad) wheelDiameter number Y 휠 직경 (m) trackWidth number Y 윤거(바퀴 간 거리, m) positionX number Y 기준점 대비 X 좌표 positionZ number Y 기준점 대비 Z 좌표 RearAxle array Y 뒷차축 정의 object maxSteering number N 최대 조향각 (rad) wheelDiameter number N 휠 직경 (m) trackWidth number Y 윤거(바퀴 간 거리, m) positionX number Y 기준점 대비 X 좌표 positionZ number Y 기준점 대비 Z 좌표 Storyboard array Y 시나리오 흐름 제어 object Init array Y 초기 동작 설정 object Actions array Y 초기 Action 그룹 object Private array N object PrivateAction array N 객체 행동 object LongitudinalAction array N object SpeedAction array N 속도 관련 액션 object SpeedActionDynamics array N 속도 변화율 정의 object dynamicsShape enum N 변화 곡선 형태 step, linear, cubic value number N 적용 값 dynamicsDimension enum N 변화 기준 time, distance,rate SpeedActionTarget array N object AbsoluteTargetSpeed array N object value number N 목표 속도 TeleportAction array Y 객체 위치 object Position array Y object WorldPosition array N 객체의 도로 위치정보 object x number Y 좌표계 X좌표 y number Y 좌표계 Y좌표 z number Y 좌표계 Z좌표 h number N 방위각 p number N 상하 회전 r number N 좌우 기울기 Story object Y 스토리 본체 object name string N 스토리 이름 Act object Y 시나리오 단계 object name string Y ManeuverGroup array Y object name string N 그룹 이름 maximumExecutionCount number Y 최대 실행 횟수 Actors array Y object selectTriggeringEntities boolean Y trigger 대상 여부 EntityRef array Y object entityRef number Y 객체 이름 Maneuver array Y object name string N 동작 이름 Event array Y object name string N 이벤트 이름 priority enum Y 이벤트 우선순위 overwrite, skip, parallel, override maximumExecutionCount number Y 최대 실행 횟수 Action array Y object name string Y 액션 이름 PrivateAction array Y object RoutingAction array N object FollowTrajectoryAction array N object TrajectoryRef array N object Trajectory array Y object name string N 이름 closed boolean Y 경로 순환여부 Shape array Y object Polyline array Y object Vertex array Y object time number N 좌표에 대한 시간 Position array Y object WorldPosition array Y object x number Y 좌표계 X좌표 y number Y 좌표계 Y좌표 z number Y 좌표계 Z좌표 TimeReference array Y object Timing array Y object domainAbsoluteRelative enum Y 시뮬레이션 시간 기준 absolute,relative scale number Y 시간축 배율 offset number Y 시간 지연값 TrajectoryFollowingMode array Y object followingMode enum Y 궤적의 방식 time,position StartTrigger array N 해당 Act 시작 조건 object ConditionGroup array N object Condition array N object name string N 조건 이름 delay number N 지연 시간 conditionEdge enum N 조건 경계 rising, falling, risingOrFalling ByValueCondition array N object StoryboardElementStateCondition array N object storyboardElementType string N 스토리보드 요소 타입 storyboardElementRef string N 감시할 대상 state string N 액션의 상태 SimulationTimeCondition array N object value number N 기준 시간 값(초 단위) rule enum N 현재 시뮬레이션 시간과 value 비교 판정 규칙 lessThan, lessOrEqual, equalTo, greaterOrEqual, greaterThan, notEqualTo StartTrigger object N object ConditionGroup object N object Condition object N object name string N delay string N conditionEdge string N ByValueCondition object N object TriggeringEntities object N object triggeringEntitiesRule string N EntityRef array N object entityRef string N EntityCondition object N object DistanceCondition object N object value string N rule enum N lessThan, lessOrEqual, equalTo, greaterOrEqual, greaterThan, notEqualTo freespace string N coordinateSystem string N Position object N object RelativeObjectPosition object N object entityRef string N dx number N dy number N dz number N stopTrigger array N object ConditionGroup array N object Condition array N object name string N 조건 이름 delay number N 지연시간 conditionEdge enum N 조건 경계 rising, falling, risingOrFalling ByValueCondition array N object StoryboardElementStateCondition array N object storyboardElementType string N 스토리보드 요소 타입 storyboardElementRef string N 감시대상 state string N 액션상태 SimulationTimeCondition array N object value string N 기준 시간 rule enum N 현재 시뮬레이션 시간과 value 비교 판정 규칙 lessThan, lessOrEqual, equalTo, greaterOrEqual, greaterThan, notEqualTo ○ 원천/라벨링 데이터 - 메타데이터
■ 데이터구성 ○ 원천/라벨링 데이터 - 메타데이터 Key Type 필수
여부Description Child Type license array Y 저작권 object copyright_holder string Y 저작권보유자 info array Y 일반정보 object contributor string Y 제작사 date_created string Y 데이터 생성일 description string Y 데이터 설명 version string Y 가공버전 Accident_Info array Y 사고 정보 object ID string Y story string N Date string Y 사고 발생 시간 Time num Y 사고 발생 시간 Collision_Type num Y 충돌유형 Accident_Type num Y 사고 유형 Accident_col_Type num Y 충돌 유형 Accident_SEX string Y 성별 Accident_Age string Y 사고 대상 MainFact num Y 사고 원인 RoadType num Y 도로유형 RoadSurface num Y 포장재질 RoadCondition num Y 노면상태 Laneseparation num Y 차선분리형태 Weather num Y 기상상태 Location num Y 위치 Accident_Severity num Y 사고심각도 Participant_Count string Y 참여자 수 Vehicle_Count string Y 사고차량수 Person_Count string Y 사고사람수 Injured_person_count string Y 부상자수 Participant_Info array Y 사고 정보 object Force_Direction num Y 충돌방향 Vehicle_Mass_A Y 1당 공차중량 Area_of_Deformation_A num Y 1당 충돌부위 Driving_Speed_A string Y 1당 주행속도 Deceleration_distance_A num Y 1당 정지거리 Collision_Speed_A string Y 1당 충돌속도 Vehicle_Mass_B string N 2당 공차중량 Area_of_Deformation_B num N 2당 충돌부위 Driving_Speed_B string N 2당 주행속도 Deceleration_distance_B num N 2당 정지거리 Collision_Speed_B string N 2당 충돌속도 2nd_Force_Direction num N 2차 충돌방향 2nd_Area_of_Deformation num N 1당 2차 충돌부위 2nd_Driving_Speed string N 1당 2차 주행속도 2nd_Deceleration_distance num N 1당 2차 정지거리 2nd_Collision_Speed string N 1당 2차 충돌속도 Contribution_Factor_1 num N 추가기여요인1 Contribution_Factor_2 num N 추가기여요인2 Contribution_Factor_3 num N 추가기여요인3 Pre_Crash_Condition num Y Pre-Crash 상태 Occupant_Info array Y 탑승자정보 object Helmat_Use num Y 헬멧 여부 ■ 데이터 포맷
○ 원천/라벨링 데이터 포맷■ 데이터 포맷 ○ 원천/라벨링 데이터 포맷 라벨링 기능 원천 데이터 포맷 라벨링 데이터 포맷 교통사고 모사 텍스트 PC(.pro) 정적 객체 매핑 PC(.pro) , 텍스트 OpenDrive 동적 정보 매핑 PC(.pro) , 텍스트 OpenScenario ○ 원천/라벨링 데이터 규모
■ 데이터 포맷 ○ 원천/라벨링 데이터 규모 데이터 획득 수단 원천 데이터(개) 라벨링 데이터(개) 3D 에셋 데이터 자체제작 1,370개
(300건)교통사고 모사(합성) 데이터 교통사고 보고서 및 영상 1,500개
(500건)900개
(300건)○ 가공 타입
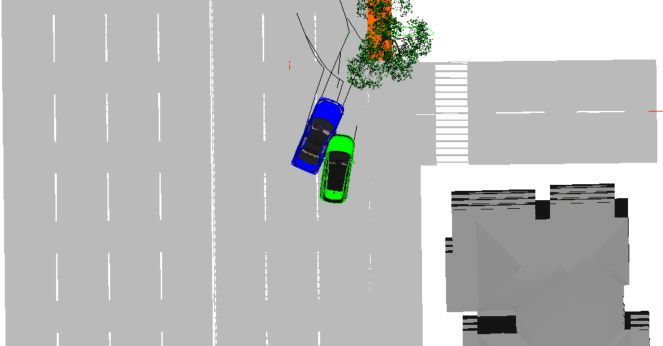
■ 데이터 포맷 ○ 가공 타입 원천 데이터 포맷 가공유형 합성데이터 시뮬레이션 교통사고 모사 데이터 정적 객체/ 동적 정보 매핑 ■ 가공 예시
○ 교통사고 모사(합성) 시뮬레이션 (.pro)

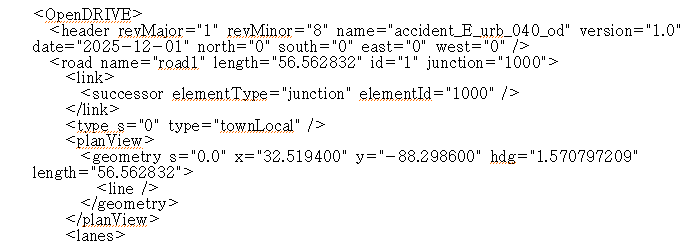
○ OpenDrive (정적 객체 매핑)
※전체 매핑 정보는 구축활용가이드에서 확인할 수 있습니다.
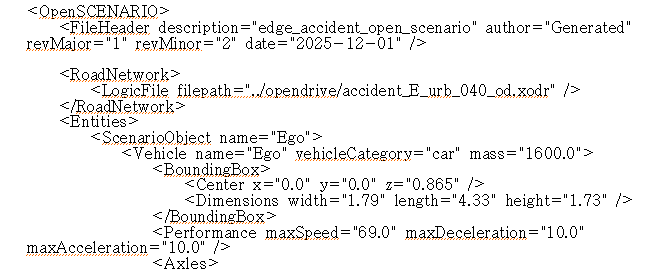
○ OpenScenario (동적 정보 매핑)※전체 매핑 정보는 구축활용가이드에서 확인할 수 있습니다.
-
데이터셋 구축 담당자
수행기관(주관) : 에이아이웍스
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 동길무 02-423-5178 gmdong@aiworkx.ai 사업총괄 / 모델개발 / 데이터 검사 수행기관(참여)
수행기관(참여) 기관명 담당업무 모비크리에티브 데이터 설계 / 데이터 수집 소다시스템 데이터 정제 / 데이터 가공 한국도로교통공단 데이터 설계 / 데이터 수집 한국자동차연구원 데이터 정제 / 데이터 가공 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 동길무 02-423-5178 gmdong@aiworkx.ai 이동욱 031-360-8191 dwlee@sdsytem.com 최경수 041-410-3827 kschoi@katech.re.kr AI모델 관련 문의처
AI모델 관련 문의처 담당자명 전화번호 이메일 동길무 02-423-5178 gmdong@aiworkx.ai 최수지 02-423-5178 sjchoi@aiworkx.ai 저작도구 관련 문의처
저작도구 관련 문의처 담당자명 전화번호 이메일 동길무 02-423-5178 gmdong@aiworkx.ai 최수지 02-423-5178 sjchoi@aiworkx.ai
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.
오프라인 데이터 이용 안내
본 데이터는 K-ICT 빅데이터센터에서도 이용하실 수 있습니다.
다양한 데이터(미개방 데이터 포함)를 분석할 수 있는 오프라인 분석공간을 제공하고 있습니다.
데이터 안심구역 이용절차 및 신청은 K-ICT빅데이터센터 홈페이지를 참고하시기 바랍니다.

국방데이터 개방 안내
본 데이터는 국방데이터로 군사 보안에 따라 AI허브에서 데이터를 제공하지 않으며,
군 담당자를 통한 별도의 사용 신청이 필요합니다.