※ 26년 신규 개방되는 데이터로, 데이터 활용성 검토, 이용자 관점의 개선의견 수렴 등을 통해 수정/보완될 수 있으며 최종데이터, 샘플데이터, 산출물 등은 변경될 수 있습니다
-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.0 2026-05-19 데이터 개방 Beta Version 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2026-05-19 산출물 최종 공개 소개
용접 환경에서 적용되는 지능형 로봇을 학습할 수 있도록 형상과 크기가 다른 모재를 대상으로 다양한 용접 방법을 적용하여 구축한 로봇 구동 정보, 3D CAD 데이터, RGB-D 데이터, PCD 데이터
구축목적
용접 숙련 인력 부족과 제조 공정의 자동화 수요에 대응하고, AI 기반 자율 제어 기술 개발과 스마트 제조 전환에 활용되는 고품질 학습 데이터로 용접 로봇 행동 생성 데이터 구축
-
메타데이터 구조표 데이터 영역 로봇·피지컬AI 데이터 유형 이미지 데이터 형식 이미지 데이터 : png / PCD 데이터 : pcd 데이터 출처 자체수집 라벨링 유형 2D 이미지 데이터 : Point, Polyline / 3D PCD 데이터 : 3D Segmentation 라벨링 형식 2D 이미지 라벨링 : json / 3D PCD 라벨링 : csv 데이터 활용 서비스 자동 용접 시스템 통합, 용접 품질/결함 진단 및 공정 모니터링 지능화, 용접 공정 시뮬레이터 학습–실데이터 전이(Sim2Real) 기반 연구 분야, 용접 공정 표준화·숙련기술 전수 분야 등에 활용 데이터 구축년도/
데이터 구축량2025년/- 모재 촬영 RGB-D 이미지 1,501set (RGB 및 Depth 이미지 각 13,509장) - 모재 형상 PCD 데이터 1,501건 - 용접 구간 2D 라벨링 1,501개 - 본용접 구간 3D Segmentation 1,501개 -
○ 클래스별 데이터 구축 수량
○ 클래스별 데이터 구축 수량 형태별 Butt Edge Lap Tee Corner 형태별합계 합계 구성비 평판-평판 120 140 140 140 140 680 45.30% -8% -9% -9% -9% -9% 평판-원형 40 20 20 40 40 160 10.70% -3% -1% -1% -3% -3% 평판-복합형상 36 34 24 32 44 170 11.30% -2% -2% -2% -2% -3% 원형-원형 48 40 40 36 36 200 13.30% -3% -3% -3% -2% -2% 원형-복합형상 32 30 32 24 27 145 9.70% (2% -2% -2% -2% -2% 복합형상-복합형상 26 36 30 24 30 146 9.70% -2% -2% -2% -2% -2% 합계 합계 302 300 286 296 317 1,501 100.00% 구성비 20.10% 20.00% 19.10% 19.70% 21.10% ○ 용접 작업 유형 별 데이터 분포
○ 용접 작업 유형 별 데이터 분포 형태별 세트 구성비 비고 Butt 302 20.12% 중첩률
97.5%Corner 317 21.12% Edge 300 19.99% Lap 286 19.05% Tee 296 19.72% 합계 1,501 100.00% ○ 모재 형상 조합 데이터 분포
○ 모재 형상 조합 데이터 분포 형태별 세트 구성비 비고 plate-plate 680 45.30% 중첩률
92.9%plate-round 160 10.60% plate-structural 170 11.33% round-round 200 13.32% round-structural 145 9.66% structural-structural 146 9.73% 합계 1,501 100.00% ○ 모재 형상 두께 분포
○ 모재 형상 두께 분포 형태별 세트 구성비 비고 3mm 391 26.05% 중첩률
93.6%6mm 391 26.05% 12mm 326 21.72% 혼합 393 26.18% 합계 1,501 100.00% ○ 모재 형상 크기 분포
○ 모재 형상 크기 분포 형태별 세트 구성비 비고 소형 612 18.72% 중첩률
80.5%중형 608 40.51% 대형 281 40.77% 합계 1,501 100.00% -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드○ 임무 정의
- 2D Object Detection : RGB 이미지에서 용접 작업 부위를 자동으로 감지하고 분류하는 작업으로, 본 과제에서는 가용접(tack welding) 지점과 본용접(main welding) 라인을 구분하여 검출
- 3D Segmentation : 3D 포인트 클라우드 데이터를 분석하여 용접이 수행되어야 할 3차원 공간 영역을 세그멘테이션○ 임무 선정 사유
- 2D Object Detection : 고품질의 가용접 데이터 구축 및 확보 여부를 확인하기 위하여, 취득한 2D 이미지 데이터를 실시간 객체 검출 작업에서 높은 효율성을 내는 YOLOv12와 같은 최신 인공지능 모델에 학습하여 구축데이터의 유효성을 검증
- 3D Segmentation : 고품질의 본용접 경로 데이터 구축 및 확보 여부를 확인하기 위해, 취득한 3D 포인트 클라우드 데이터를 3D 세그멘테이션 작업에서 높은 효율성을 내는 PointNeXt와 같은 최신 인공지능 모델에 학습하여 용접 구간을 세그멘테이션 하는지를 확인함으로써 구축한 데이터의 품질 평가○ 학습 모델 개발 환경
- 학습 환경: CentOS, Python, Pytorch, GPU
- 모델리소스 및 자원 활용: 고성능 GPU 서버를 사용하여 모델 학습을 진행
- 모델 개발: 1-Cycle 자가 점검 계획에 맞춰 모델 개발
- 성능 지표 결과를 통해 가장 성능이 우수한 모델로 최종 선정○ 최종 선정 모델
- YOLOv12
* Attention 메커니즘을 중심으로 설계되어 CNN의 빠른 속도를 유지하면서도 강력한 특징 추출 능력을 제공하며, Area Attention(A2) 모듈을 통해 연산 복잡도 문제를 효과적으로 해결
* 기존 YOLO 시리즈 대비 우수한 검출 성능을 보이며(YOLOv11 대비 1.2% mAP, YOLOv10 대비 2.1% mAP 향상), PointMLP 대비 10배 빠른 추론 속도로 실시간 검출이 가능
* R-ELAN 구조와 FlashAttention을 활용하여 대규모 모델의 최적화 문제를 극복하고 메모리 효율성을 개선함으로써, 크기가 작고 불규칙한 가용접 영역을 정밀하게 탐지하는 데 유리함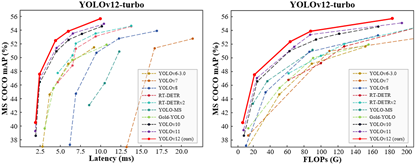
[ YOLOv12 모델 ]
* PointNet++의 잠재력을 체계적으로 재검토하여 개선된 학습 전략과 데이터 증강 기법만으로 ScanObjectNN에서 8.2% OA, S3DIS에서 13.6% mIoU의 성능 향상 달성
* Inverted Residual MLP 블록과 분리형 MLP를 도입하여 효율적인 모델 스케일링 전략을 제시하며, S3DIS에서 74.9% mIoU로 Point Transformer를 능가하는 우수한 3D semantic segmentation 성능
* 강건한 3D 공간 이해 능력과 효율적인 포인트 클라우드 처리 능력을 통해 멀티뷰 RGB-D 데이터로부터 정합된 3D 형상에서 본용접 라인을 정밀하게 세그멘테이션하는 데 최적화되어 있음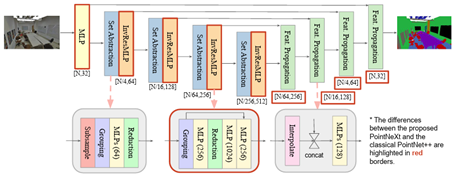
[ PointNeXt 모델의 구조 ]
○ 학습 데이터 생성
2D Object Detection (YOLOv12)
- 학습 데이터 메타데이터 전처리
* XML 형식의 라벨 파일을 YOLO Pose 포맷 TXT 파일로 변환 전처리(각 줄은 class_id cx cy w h x1 y1 v1 x2 y2 v2 ... 형식으로 구성되며, class_id는 클래스 인덱스, cx·cy는 바운딩 박스 중심 좌표, w·h는 너비 및 높이, x·y는 각 키포인트 좌표, v는 키포인트 가시성(visibility)으로 모두 이미지 크기 대비 0~1로 정규화된 값)- 학습 데이터 포맷 변경 및 분할(8:1:1 로 분할)
* train – 이미지, labels.txt
* val – 이미지, labels.txt
[ 2D object Detection 학습데이터 생성 예시 ]
3D Segmentation (PointNeXt)
- 학습 데이터 전처리
* CSV 형식으로 제공된 3차원 포인트 클라우드 데이터를 NPY 파일로 변환 전처리(각 포인트는 3차원 좌표(x, y, z), RGB 색상 정보(r, g, b), 레이블(label)의 총 7개 속성으로 구성되며 shape: (N, 7)의 float32 배열로 저장됨. 레이블은 0: 용접 비드 영역, 1: 배경 영역, 2: 기타 영역으로 정의됨. 클래스 불균형 해소를 위해 용접 비드 영역(0)은 모든 포인트를 유지하고, 배경 영역(1)은 균일 샘플링을 적용하였으며, 분석 대상이 아닌 기타 영역(2)은 완전히 제외하여 최종 NPY 파일로 저장)- 학습 데이터 포맷 변경 및 분할(8:1:1 로 분할)
* train – 전처리 된 npy 파일
* val – 전처리 된 npy 파일
* test - 전처리 된 npy 파일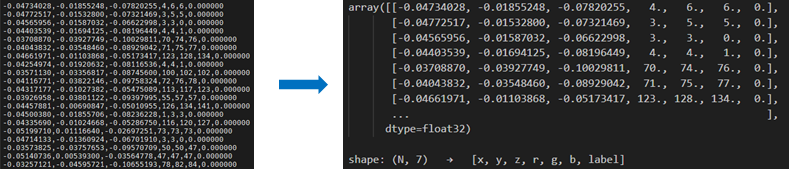
[ 3D object Detection 학습데이터 전처리 예시 ]
○ AI 모델 성능
○ AI 모델 성능 AI Task 알고리즘 데이터 수량 성능지표 목표치 총 구축량 학습
-80%검증
-10%평가
-10%2D Object
DetectionYOLOv12 RGB 이미지 13,509건
라벨 데이터 1,501건RGB 이미지 12,150건
라벨 데이터 1,350건RGB 이미지 1,350건
라벨 데이터
150건RGB 이미지
1,359건
라벨 데이터
151건AP 65 이상 AP 65 이상 3D segmentation PointNeXt PCD 데이터 1,501건
라벨 데이터 1,501건PCD 데이터 1,189건
라벨 데이터 1,189건PCD 데이터
156건
라벨 데이터
156건PCD 데이터
156건
라벨 데이터
156건IoU 65 이상 RMSE 5mm이하 -
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드구분 속성명 타입 필수
여부설명 범위 예시 1 info object Y 일반 정보 - - 1-1 gid string Y 데이터 세트 정보 - C_PR_06_0002 1-2 project string Y 프로젝트명 “welding robot motion planning dataset” welding robot motion planning dataset 1-3 creator string Y 구축기관 "흥일기업 주식회사" 흥일기업 주식회사 2 categories object Y 카테고리 정보 - - 2-1 metal_position string Y 용접방식 "Butt","Edge","Lap","Tee","Corner" Corner 2-2 parent_metal string Y 모재조합 "plate-plate",
"plate-round",
"plate-structural",
"round-round",
"round-structural",
"structural-structural"plate-round 2-3 object_size string Y 모재 크기 "S","M","L" “S” 2-4 metal_thickness object Y 모재 두께 "3","6","12","M" “6” 3 rgb_images array Y RGB 이미지정보 - - 3-1 images_id number Y RGB 이미지 ID 1~9 1 3-2 camera_model string Y 카메라 정보 "orbbec_femtomega" orbbec_femtomega 3-3 filename string Y RGB 이미지 파일명 - C_PR_06_0002_B_Color.png 3-4 rgb_width number Y RGB 이미지 넓이 1920 1920 3-5 rgb_height number Y RGB 이미지 높이 1080 1080 4 depth_images array Y Depth 이미지 정보 - - 4-1 images_id number Y Depth 이미지 ID 1~9 1 4-2 camera_model string Y 카메라 정보 "orrbec_femtomega" orbbec_femtomega 4-3 filename string Y Depth 이미지 파일명 - C_PR_06_0002_B_Color.png 4-4 depth_width number Y Depth 이미지 넓이 640 1920 4-5 depth_height number Y Depth 이미지 높이 576 1080 5 annotation_3dpointcloud object Y 3D 어노테이션 정보 - - 5-1 pcd_filename string Y PCD 파일명 - C_PR_06_0002.pcd 5-2 3dlabel_filename string Y 3D 가공 데이터 파일명 - C_PR_06_0002.csv 6 collection_environment object Y 수집환경 정보 - - 6-1 datetime string Y 데이터 수집일 - 2025-10-29 16:23 6-2 illumination number Y 조도 100~5,000 483 6-3 temperature number Y 온도 5~80 59 6-4 humidity number Y 습도 20~80 11 6-5 robot_model string Y 로봇 모델명 “RB10-1300” RB10-1300 6-6 location string Y 수집 장소 “흥일기업 진영공장” 흥일기업 진영공장 6-7 operator_id string Y 수집 작업자 ID “WT01” “WT01 7 annotation_image array Y 이미지 어노테이션 정보 - - 7-1 image_filename string Y 이미지 파일명 - C_PR_06_0002_B_Color.png 7-2 image_label array Y 이미지 라벨 - - 7-3 id number Y 어노테이션 ID 1~10 1 7-4 type string Y 어노테이션 방식 "point","polyline","unlabeled" polyline 7-4-1 label string Y 어노테이션 라벨 정보 "full_welding","tack_welding","unlabeled" full_welding 7-4-2 points number Y 어노테이션 정보 0~1920 [
[
969.6,
643.1
],
[
970.3,
653.2
],
[
970.1,
659.6
],
[
968.3,
668.5
],
[
964.2,
676.4
],
[
959.3,
683.5
]
] -
데이터셋 구축 담당자
수행기관(주관) : 흥일기업㈜
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 김종백 02-6283-0156 jbkim@hungil.co.kr 데이터 수집, 정제, 가공, 사업관리 수행기관(참여)
수행기관(참여) 기관명 담당업무 국립한밭대학교 산학협력단 AI 모델 유효성 검증 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 김종백 02-6283-0156 jbkim@hungil.co.kr AI모델 관련 문의처
AI모델 관련 문의처 담당자명 전화번호 이메일 최동걸 042-821-1213 저작도구 관련 문의처
저작도구 관련 문의처 담당자명 전화번호 이메일 김종백 02-6283-0156 jbkim@hungil.co.kr
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.
오프라인 데이터 이용 안내
본 데이터는 K-ICT 빅데이터센터에서도 이용하실 수 있습니다.
다양한 데이터(미개방 데이터 포함)를 분석할 수 있는 오프라인 분석공간을 제공하고 있습니다.
데이터 안심구역 이용절차 및 신청은 K-ICT빅데이터센터 홈페이지를 참고하시기 바랍니다.

국방데이터 개방 안내
본 데이터는 국방데이터로 군사 보안에 따라 AI허브에서 데이터를 제공하지 않으며,
군 담당자를 통한 별도의 사용 신청이 필요합니다.