※ 26년 신규 개방되는 데이터로, 데이터 활용성 검토, 이용자 관점의 개선의견 수렴 등을 통해 수정/보완될 수 있으며 최종데이터, 샘플데이터, 산출물 등은 변경될 수 있습니다
-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.0 2026-05-19 데이터 개방 Beta Version 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2026-05-19 산출물 최종 공개 소개
- 다수의 물체가 서로 가려져 있는 물류 환경에서 물체를 인식하고 충돌을 고려하여 파지하기 위한 단계적 사고 과정의 CoT 데이터
구축목적
- 다양한 물체가 비정형으로 배치된 상황에서 물체를 인식하고 파지하기 위한 CoT를 단계적으로 구조화하며, 사용자가 지시한 타겟 물체의 파지 자세와 CoT 추론 과정을 데이터로 구축하고자 함
-
메타데이터 구조표 데이터 영역 로봇·피지컬AI 데이터 유형 3D 데이터 형식 PNG(texture), OBJ, MTL, PNG(rgb), NPY(depth), PCD 데이터 출처 - 실환경 촬영 데이터: 실제 물류 환경에서 취득한 촬영 데이터 - 가상환경 촬영 데이터: 물리 시뮬레이터를 기반으로 생성한 촬영 데이터 라벨링 유형 - 3D 라벨링 - CoT 라벨링 라벨링 형식 JSON 데이터 활용 서비스 복잡한 장면에서 사람처럼 단계적인 판단을 수행할 수 있도록 사고의 흐름(Chain-of-Thought, CoT)을 구조화하여 각 단계를 명시적으로 제공함으로써, 복잡한 환경에서 안정적이고 효과적인 작업 수행이 가능한 로봇 조작 시스템 개발에 핵심 기반으로 활용 데이터 구축년도/
데이터 구축량2025년/o 원천데이터 - 3D CAD 1,890건 - 실제환경 71,994건 - 가상환경 71,598건 o 라벨링데이터 - 3D CAD 630건 - 실제환경 71,994건 - 가상환경 71,598건 -
○ 물체 출현 빈도 수 분포
○ 물체 출현 빈도 수 분포 구분 정량목표 결과값 목표 구성비 비율(%) 수량(건) 1 분포확인 18.48 47,864 2 18.23 47,192 3 16.63 43,067 4 14.53 37,612 5 12.22 31,655 6 9.01 23,318 7 5.53 14,322 8 3.05 7,914 9 1.48 3,824 10 0.62 1,595 11 0.21 552 12 0.01 24 합계 - 100% 258,939 ○ 실제/가상 환경별 분포
○ 실제/가상 환경별 분포 구분 정량목표 결과값 목표 구성비 비율(%) 수량(건) 실제 50 50.14 23,998 가상 50 49.86 23,866 합계 100% 100% 47,864 ○ 물류 환경별 분포
○ 물류 환경별 분포 구분 정량목표 결과값 목표 구성비 비율(%) 수량(건) 피킹 작업 구역 30 29.98 14,351 분배 작업 구역 30 30 14,361 포장 작업 구역 40 40.02 19,152 합계 100% 100% 47,864 ○ 3D CAD 물체 대분류 분포
○ 3D CAD 물체 대분류 분포 구분 정량목표 결과값 목표 구성비 비율(%) 수량(건) 생활용품류 28.6 28.57 60 식품/과자류 28.6 28.57 60 전자/기기류 19 19.05 40 스포츠/완구류 9.5 9.53 20 포장재/용기류 7.15 7.14 15 기타류 7.15 7.14 15 합계 100% 100% 210 ○ 취득 조도별 분포
- 어두운 물류 환경을 고려하여 100-400 범위에서 가장 많은 데이터가 취득되었으며, AI 모델의 다양한 환경에 대한 강건성을 위해 400-700 범위와 700-1000 범위의 다양한 조도 환경에서도 취득함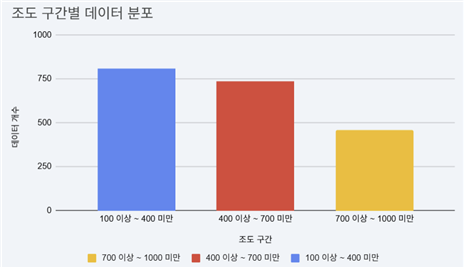
○ 물체별 등장 횟수 및 분포
- 분포표에서 90회~130회 등장의 비율이 약 80%로 등장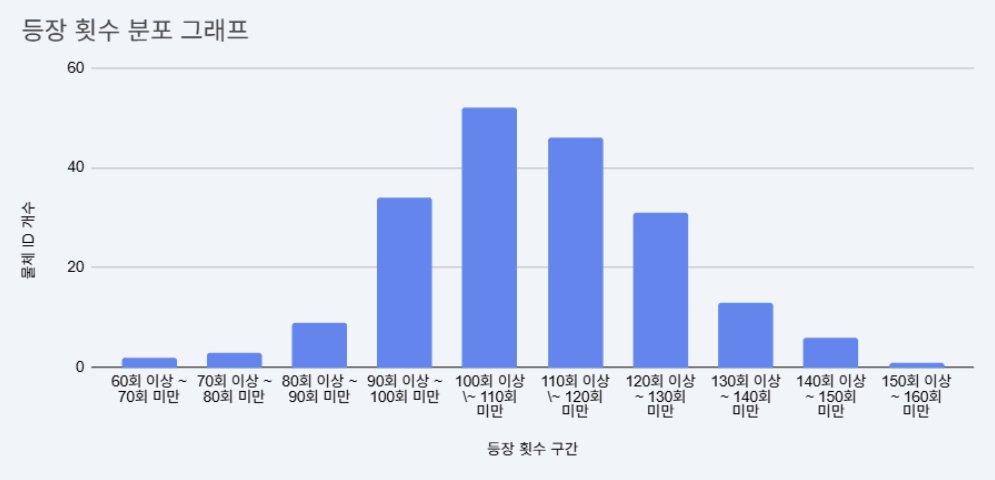
○ 물체별 질감 분포
- 등장 물체별 표면 속성에서 일반적으로 많이 보이는 제품인 ‘매끄러움’표면을 가진 경우가 50% 비율로 등장○ 물체별 질감 분포 질감 분류 총 등장 횟수 총 비율(%) 매끄러움 13,892 54.06 무광 7,536 29.33 거침 2,266 8.82 유광 2,002 7.79 총계 25,696 100 -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드○ 6자유도 파지자세 추정
○ 6자유도 파지자세 추정 구분 내 용 임무 정의
및 개념- 임무 : 6 자유도 파지자세 추정 (6-DoF Grasp Detection)
- 개념 : 시각 센서(색상-깊이 포함) 이미지를 통해 로봇 팔이 물체를 안정적으로 집을 수 있도록 6자유도(위치 3축 + 회전 3축) 파지 자세를 생성하는 임무임무 유형
선정⓵ 분류 ⓶ 탐지 ⓷ 추정 ⓸ 이해 ⓹ 합성 ⓺ 기타 ■ ■ ■ □ □ □ 임무 선정
사유- 구축된 데이터는 실제 및 가상 물류 환경을 모사하여 수집된 다양한 파지 상황이며, 물체 상태와 충돌 가능성 정보를 함께 포함하고 있어 파지 자세 생성 및 검출을 위한 모델 학습에 최적화
- 구축된 데이터를 통해 다양한 환경의 이미지-3D 정보에서 파지 데이터 정밀도와 생성된 파지 다양성 평가가 가능한 핵심 알고리즘이기에 임무로 선정최종 선정
모델- Economic Grasp

학습 모델
개발환경CPU [AMD] 라이젠7-6세대 9800X3D Memory SK DDR-5600 128G (32G*4) GPU Geforce RTX 5090 32GB Storage SK Platinum P41 M.2 NVMe 2TB OS Linux Ubuntu 24.04.3 LTS (6.14.0-28-generic) 모델 성능 측정지표 목표치 결과값 목표충족 여부 AP 65 이상 70.77 달성 ○ 파지 대상 객체 분할 성능
○ 파지 대상 객체 분할 성능 구분 내 용 임무 정의
및 개념- 임무 : 파지 대상 객체 분할 성능
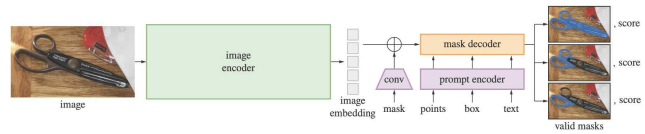
- 개념 : 시각 센서(색상) 이미지 및 자연어로 주어진 명령(예: “파란색 물병을 집어”)에 알맞은 객체 분할 출력을 생성하는 임무임무 유형
선정⓵ 분류 ⓶ 탐지 ⓷ 추정 ⓸ 이해 ⓹ 합성 ⓺ 기타 ■ □ ■ ■ □ □ 임무 선정
사유- 구축된 데이터를 통해 사용자가 의도하는 물체를 지정해야 하며 해당 물체를 이미지에서 객체로 분할하는 모델 학습에 최적화
- 구축된 데이터를 통해 사용자가 자연어로 지칭하는 물체를 인식할 뿐만 아니라 물체의 이미지 내 위치까지 파악이 가능한 알고리즘이기에 임무로 선정최종 선정
모델- Segment Anything(SAM)
학습 모델
개발환경CPU [AMD] 라이젠7-6세대 9800X3D Memory SK DDR-5600 128G (32G*4) GPU Geforce RTX 5090 32GB Storage SK Platinum P41 M.2 NVMe 2TB OS Linux Ubuntu 24.04.3 LTS (6.14.0-28-generic) 모델 성능 측정지표 목표치 결과값 목표충족 여부 mIoU 80 이상 87.17 달성 ○ CoT 기반 물체 파지 성능
○ CoT 기반 물체 파지 성능 구분 내 용 임무 정의
및 개념- 임무 : CoT 기반 물체 파지 성능
- 개념 : 자연어로 주어진 명령(예: “파란색 물병을 집어”)에 알맞은 대상 물체를 인식하고, 파지 수행하는 임무임무 유형
선정⓵ 분류 ⓶ 탐지 ⓷ 추정 ⓸ 이해 ⓹ 합성 ⓺ 기타 ■ ■ ■ ■ □ □ 임무 선정
사유- 구축된 데이터는 파지를 위한 단계적 사고 기반(CoT) 구조로 구성되어 있어, 언어 명령 해석부터 물체 식별, 파지까지의 추론 과정을 학습하기에 적합
- 구축된 데이터를 통해 자연어 명령 기반의 파지 작업을 실제 무인창고, 스마트 팩토리 등 실제 물류 환경에서 활용 가능하므로 임무로 선정최종 선정
모델- OWG(Open-World Grasper) - GIST implementation
* 원본 알고리즘이 이용하는 GPT API를 사용할 수 없으므로 일부 자체 구현
* 원본 알고리즘은 pretrained 4 DoF 파지를 이용, 6 DoF 파지를 이용하도록 자체 구현학습 모델
개발환경CPU [AMD] 라이젠7-6세대 9800X3D Memory SK DDR-5600 128G (32G*4) GPU Geforce RTX 5090 32GB Storage SK Platinum P41 M.2 NVMe 2TB OS Linux Ubuntu 24.04.3 LTS (6.14.0-28-generic) 모델 성능 측정지표 목표치 결과값 목표충족 여부 작업 성공률
(Task Success Rate)70 이상 75.91 달성 -
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드○ 3D CAD 데이터 어노테이션 포맷
○ 3D CAD 데이터 어노테이션 포맷 번호 항목명 타입 필수 항목 설명 예시 1 raw_data_info object 원시데이터 정보 - 1.1 obj_filename string Y obj 파일 “L_01_001_00.obj” 1.2 mtl_filename string Y mtl 파일 “L_01_001_00.mtl” 1.3 png_filelist array Y png 파일 리스트 [“L_01_001_00.png”, ...] 1.4 object_type object 물체 정보 - 1.4.1 category number Y 분류 번호 1 1.4.2 object_id number Y 불체 id 2 1.4.3 object_property object Y 물체 물성 정보 {“weight”: “1.2kg”, “material”: “wood”, “surface”: “rough”, ...} ○ 물체 자세 데이터 어노테이션 포맷
○ 물체 자세 데이터 어노테이션 포맷 번호 항목명 타입 필수 항목 설명 예시 1 raw_data_info object 원시데이터 정보 - 1.1 rgb_filename string Y RGB 이미지 “L_R_01_000001_000001.png” 1.2 depth_filename string Y Depth 이미지 “L_R_01_000001_000001.npy” 1.3 camera_info object Y 카메라 정보 {"cam_R_w2c": [-0.04, 0.87, -0.3, 0.76, 0.33, 0.54, 0.64, -0.34, -0.68], "cam_t_w2c": [-94.8, 189.90, 23.0], "cam_K": [322.2, 0.0, 320.8, 0.0, 312.4, 178.8, 0.0, 0.0, 1.0], "depth_scale": 10, "camera_type": "realsense"} 1.4 luminous number Y 조도 정보 125.177 1.5 equipment_info array 물류 설비 정보 - 1.5.1 equipment_size array Y 물류 설비의 크기 [200, 150, 800] (width, height, depth) 1.5.2 6d_pose_info object Y 형상정보 {"obj_filename": "L_01_001_00.obj", “rotation”: [0.54, 0.64, -0.34, -0.68, 0.12, -0.40, -0.88, -0.05, 0.19], "position": [0.112, -0.111, 0.331]} 2 source_data_info object 원천데이터 정보 - 2.1 pcd_filename string Y PCD 데이터 “L_R_01_000001_000001.pcd” 3 learning_data_info object 라벨링 정보 - 3.1 instance_id number Y 객체 ID 1 3.3 object_class number N 물체 클래스 ID 1 3.4 pose_position array Y 물체 3차원 위치 [0.228, 0.066, 0.649] 3.5 pose_rotation array Y 물체 3차원 회전 [-0.0016, -0.9361, 0.3516,
-0.9993, -0.0023, -0.0111,
0.0112, -0.3516, -0.9361]○ 파지 자세 데이터 어노테이션 포맷
○ 파지 자세 데이터 어노테이션 포맷 번호 항목명 타입 필수 항목 설명 예시 1 raw_data_info object 원시데이터 정보 - 1.1 rgb_filename string Y RGB 이미지 “L_R_01_000001_000001.png” 1.2 depth_filename string Y Depth 이미지 “L_R_01_000001_000001.npy” 1.3 camera_info object Y 카메라 정보 {"cam_R_w2c": [-0.04, 0.87, -0.3, 0.76, 0.33, 0.54, 0.64, -0.34, -0.68], "cam_t_w2c": [-94.8, 189.90, 23.0], "cam_K": [322.2, 0.0, 320.8, 0.0, 312.4, 178.8, 0.0, 0.0, 1.0], "depth_scale": 10, "camera_type": "realsense"} 1.4 luminous number Y 조도 정보 125.177 1.5 equipment_info array 물류 설비 정보 - 1.5.1 equipment_size array Y 물류 설비의 크기 [200, 150, 800] (width, height, depth) 1.5.2 6d_pose_info object Y 형상정보 {"obj_filename": "L_01_001_00.obj", “rotation”: [0.54, 0.64, -0.34, -0.68, 0.12, -0.40, -0.88, -0.05, 0.19], "position": [0.112, -0.111, 0.331]} 2 source_data_info object 원천데이터 정보 - 2.1 pcd_filename string Y PCD 데이터 “L_R_01_000001_000001.pcd” 3 learning_data_info object 라벨링 정보 - 3.1 instance_id number Y 객체 ID 1 3.2 object_type number Y 물체 클래스 이름 Milk 3.3 object_class array N 물체 클래스 ID 1 3.5 grasp_data number N 파지 데이터 - 3.5.1 grasp_id array N 파지자세 ID 1 3.5.2 grasp_rotation array N 파지 자세
3차원 회전[0.097, 0.648, -0.755, 0.976, 0.085, 0.199,
0.193, -0.756, -0.624]3.5.3 grasp_position number N 파지 자세
3차원 위치[-0.025, 0.048, 0.746] 3.5.4 grasp_width number N 파지 너비 0.06 3.5.5 grasp_depth number N 파지 깊이 0.01 3.5.6 grasp_score string N 파지 점수 0.85 3.5.7 grasp_image String N 파지 자세 이미지 Hz75ABB596... ○ CoT 데이터 어노테이션 포맷
○ CoT 데이터 어노테이션 포맷 번호 항목명 타입 필수 항목 설명 예시 1 raw_data_info object 원시데이터 정보 - 1.1 rgb_filename string Y RGB 이미지 “L_R_01_000001_000001.png” 1.2 depth_filename string Y Depth 이미지 “L_R_01_000001_000001.npy” 1.3 camera_info object Y 카메라 정보 {"cam_R_w2c": [-0.04, 0.87, -0.3, 0.76, 0.33, 0.54, 0.64, -0.34, -0.68], "cam_t_w2c": [-94.8, 189.90, 23.0], "cam_K": [322.2, 0.0, 320.8, 0.0, 312.4, 178.8, 0.0, 0.0, 1.0], "depth_scale": 10, "camera_type": "realsense"} 1.4 luminous number Y 조도 정보 125.177 1.5 equipment_info array 물류 설비 정보 - 1.5.1 equipment_size array Y 물류 설비의 크기 [200, 150, 800] (width, height, depth) 1.5.2 6d_pose_info object Y 형상정보 {"obj_filename": "L_01_001_00.obj", “rotation”: [0.54, 0.64, -0.34, -0.68, 0.12, -0.40, -0.88, -0.05, 0.19], "position": [0.112, -0.111, 0.331]} 2 source_data_info object 원천데이터 정보 - 2.1 pcd_filename string Y PCD 데이터 “L_R_01_000001_000001.pcd” 3 learning_data_info object 라벨링 정보 - 3.1 query object Y 사용자 입력 쿼리 3.1.1 rgb_image string Y RGB 이미지 L_R_01_000002_000001.png 3.1.2 mask_image string Y 마스크 이미지 L_M_R_01_000002_000001.png 3.1.3 grasp_image string Y 파지 자세 이미지 L_G_R_01_000002_000001.png 3.1.4 instruction string Y 사용자 지시 문장 “초록 뚜껑 소스 통 꺼내줘” 3.2 cot_reasoning object 단계적 사고 답변 과정 - 3.2.1 CoT1_Finding_ object CoT 1 – 타겟 물체 찾기의 질문 및 답변 - Target_Object 3.2.1.1 CoT_instruction string Y CoT 지시문 너는 숙련된 grounding model 이다. instruction에 해당하는 물체를 mask 이미지의 객체 ID를 찾아서 대답해라. 3.2.1.2 CoT_input string Y CoT_환경 인식 "첫 번째 이미지는 RGB 이미지이고, 두 번째 이미지는 instance별로 각 객체를 구분하고 색상으로 ID를 표현하는 mask 이미지입니다. 각 객체의 중심에는 mask 색상과 동일한 색상의 instance_id가 검은색 상자 안에 표시됩니다." 3.2.1.3 CoT_reasoning string Y 타겟 물체 탐색 사고 과정 instruction이 공간적인 관계를 설명하면, 주어진 이미지에서 물체들 간의 공간정보를 파악하여 타겟 물체를 추론해야 한다. 만약 “머그 컵 왼쪽 그릇” instruction의 경우 머그 컵을 찾고, 왼쪽에 있는 물체들 중 그릇에 해당하는 객체를 찾아라. 3.2.1.4 CoT_answer string Y 타겟 물체 특정 instruction에서 지칭하는 초록색 뚜껑이 달린 물체는 왼쪽 끝에 있으므로 타겟 물체 ID는 5 입니다. 3.2.2 CoT2_Collision_ object Y CoT 2 – 충돌 가능성 추론의 질문 및 답변 - Reasoning 3.2.2.1 CoT_instruction string Y CoT 지시문 너는 숙련된 grasping model 이다. 타겟 물체 주변에서 충돌이 가능한 물체를 찾고, 어느 파지 자세가 충돌이 유력한지 추론해라. 충돌을 고려해서 파지점을 선택해라 3.2.2.2 CoT_input string Y CoT_환경 인식 "RGB 이미지와 동일한 크기의 mask 이미지에서 각 객체는 색상과 instance ID로 표시됩니다. grasp 이미지는 대상 객체 주변을 잘라내고, 고유한 색상과 ID를 가진 다양한 grasp point가 표시됩니다. 각 grasp 포인트는 4개의 직선(두 개의 평행선, 연결선, 접근선)으로 표현됩니다." 3.2.2.3 CoT_reasoning string Y 충돌 가능성 사고 과정 만약 파지 자세가 물체의 중앙에 있으면 충돌 가능성이 적은 파지 자세로 볼 수 있다. 만약 물체의 좌, 우, 상, 하 방향에 다른 객체가 존재한다면, 해당 방향으로 접근하는 파지 자세는 충돌이 발생할 가능성이 높다. 3.2.2.4 CoT_answer string Y 충돌 가능성 추론 결과 물체 2는 타겟 물체의 아래에 있어 충돌 가능성이 있다. 파지 14번은 오른 벽에 충돌할 수 있다.
Target Grasp ID: 12, 13, 15, 163.2.3 CoT3_Physical_ object Y CoT 3 – 물성 및 안정성 추론의 질문 및 답변 - Reasoning 3.2.3.1 CoT_instruction string Y CoT 지시문 너는 숙련된 grounding model 이다. 파지 자세 중 파지 후 들어올렸을 때 무게 중심등에 의해 떨어지거나 미끄러질 수 있는 파지 자세를 추론해라. 물체의 물성을 고려하여 파지 자세를 선택해라. 3.2.3.2 CoT_input string Y CoT_환경 인식 "RGB, 마스크, grasp 이미지가 제공됩니다. 마스크는 RGB와 동일한 크기이며, 객체는 고유한 색상과 숫자 ID로 시각화됩니다. grasp 이미지는 목표 객체를 중심으로 잘려 있으며, 각 grasp point는 고유한 색상과 ID로 구분됩니다. 각 grasp 포인트는 4개의 직선(두 개의 평행선, 연결선, 접근선)으로 표현됩니다." 3.2.3.3 CoT_reasoning string Y 물성 및 안정성 사고 과정 물체의 가장 자리에 위치한 파지 자세의 경우 들어올렸을 때 빠질 수 있다. 파지 하는 부분의 물질이 금속이나 비닐일 경우 마찰력이 작아서 파지 후 미끄러질 수 있다. 3.2.3.4 CoT_answer string Y 물성 및 안정성 추론 결과 파지 자세 13, 15, 16은 물체 왼쪽 끝 가장자리에 위치하여 안정적이지 않음
Target Object ID: 5/ Target Grasp ID: 123.3 answer object Y 타겟 물체 및 파지점 - 3.3.1 target_reasoning string Y 단계적 사고과정 “지시문을 해석하여 여러 저장 용기 중 초록색 뚜껑을 가진 소스 용기를 목표 물체로 추론한다. 이후 타겟 물체에 대해 상부, 측면 등 다양한 파지 후보 자세에 대해 주변 물체나 환경과의 충돌 가능서을 평가하여 충돌없는 후보만 남긴다. 남은 후보 자세에 대해 접촉 면적, 무게 중심 등을 고려해 파지 안정성이 높은 자세를 선택한다.” 3.3.1 target_object array Y instruction에 해당하는 객체 ID의 리스트 [5] 3.3.2 target_grasp array Y instruction에 해당하는 파지 자세 ID의 리스트 [6] -
데이터셋 구축 담당자
수행기관(주관) : 주식회사 유니바
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 정용운 이사 053-615-1263 gandalf@univa.co.kr 실무 책임 수행기관(참여)
수행기관(참여) 기관명 담당업무 씨앤비시스템 데이터 수집 및 정제 광주과학기술원 데이터 가공 및 모델학습 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 유니바 정용운 이사 053-615-1263 gandalf@univa.co.kr AI모델 관련 문의처
AI모델 관련 문의처 담당자명 전화번호 이메일 광주과학기술원 김희수 연구원 062-715-5355 huisu0103@gm.gist.ac.kr 저작도구 관련 문의처
저작도구 관련 문의처 담당자명 전화번호 이메일 광주과학기술원 김희수 연구원 062-715-5355 huisu0103@gm.gist.ac.kr
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.
오프라인 데이터 이용 안내
본 데이터는 K-ICT 빅데이터센터에서도 이용하실 수 있습니다.
다양한 데이터(미개방 데이터 포함)를 분석할 수 있는 오프라인 분석공간을 제공하고 있습니다.
데이터 안심구역 이용절차 및 신청은 K-ICT빅데이터센터 홈페이지를 참고하시기 바랍니다.

국방데이터 개방 안내
본 데이터는 국방데이터로 군사 보안에 따라 AI허브에서 데이터를 제공하지 않으며,
군 담당자를 통한 별도의 사용 신청이 필요합니다.