-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.2 2022-09-28 데이터 재개방 Training, Validation/원천데이터, 라벨링데이터 1.1 2021-07-13 데이터 변경 데이터 추가 1.0 2021-06-30 데이터 개방 데이터 최초 개방 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2026-05-06 기타 태그 추가 2023-12-04 산출물 공개 저작도구 소스코드 2022-10-12 샘플데이터 개방 신규 샘플데이터 개방 소개
안내 서비스를 수행하는 로봇시점 영상 및 음성 데이터
- 데이터 영역 : 영상이미지·멀티모달
- 데이터 유형 : 텍스트 , 이미지
- 구축년도 : 2020년
- 구축량 : 100만
구축목적
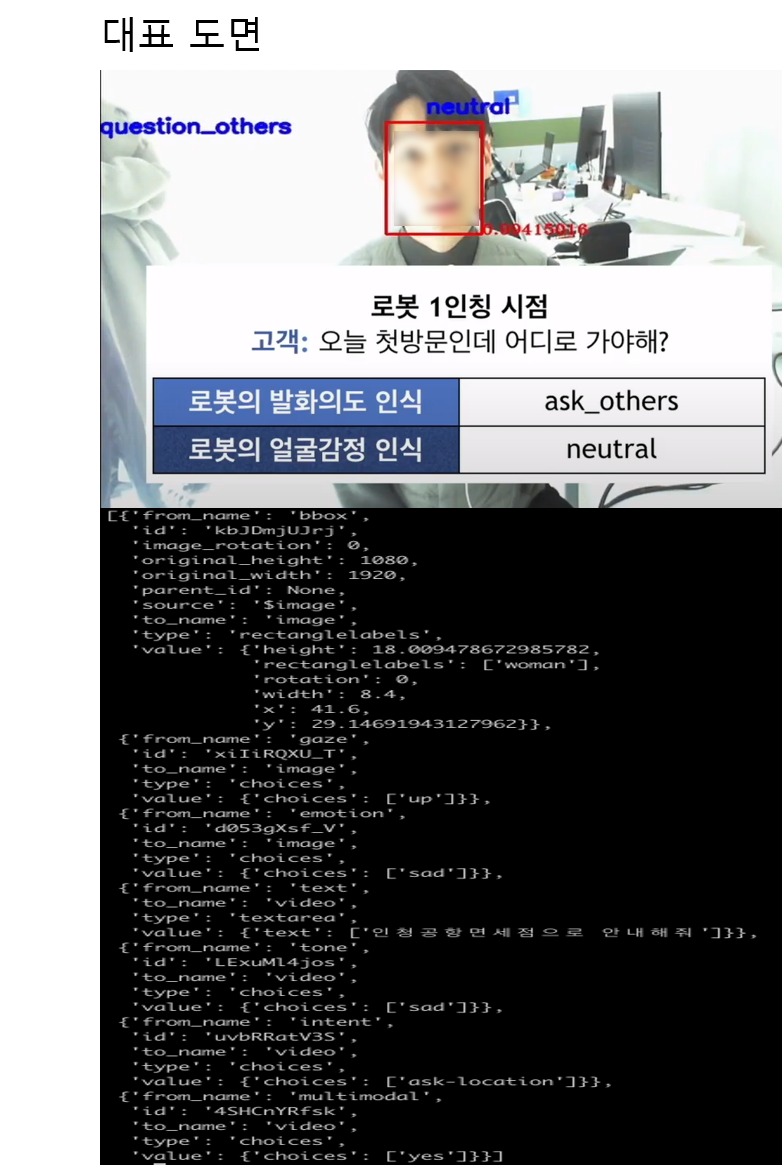
안내 로봇이 사람과 보다 자연스러운 인터랙션을 하기 위한 1인칭 시점에서 사람과의 인터랙션하는 데이터셋
-
구축 내용 및 제공 데이터량
- 1) 영상
- 원시데이터: 로봇 관점 영상 500시간 (mp4 포맷), 음성 300시간 (멀티모달 데이터의 특성상, 음성은 영상에 포함되어 있음)
- 정제데이터: 로봇 관점 영상 클립 216,000개 (mp4 포맷) (사용자가 발화하는 시간외 영상 제거, 필요시 비식별화 처리)
- 가공 후 데이터: 이미지 기준 1,008,000장에 대한 bounding boxw정보, 사용자의 표정, 시선 정보, 발화의도, 발화 어조, 시선 (json포맷)
- 2) 멀티모달 데이터
- 원시데이터: 위 영상 데이터
- 정제데이터: 위 영상 데이터
- 가공 후 데이터: 시각/음성/텍스트 정보를 기반으로 사용자가 안내 로봇과 인터랙션을 수행하는지 여부에 대한 라벨링
(이미지 1,008,000에 대한 라벨링, json 포맷)
- 1) 영상
-
-
데이터 성능 점수
측정값 (%)기준값 (%)데이터 성능 지표
데이터 성능 지표 번호 측정항목 AI TASK 학습모델 지표명 기준값 점수 측정값 점수 1 발화의도 분류 Image Classification CNNs, Transformer Accuracy 70 % 71.5 % 2 객체검출 Object Detection CNNs, Transformer mAP 70 % 85.2 %
※ 데이터 성능 지표가 여러 개일 경우 각 항목을 클릭하면 해당 지표의 값이 그래프에 표기됩니다.
※ AI모델 평가 지표에 따라 측정값의 범위, 판단 기준이 달라질 수 있습니다. (ex. 오류율의 경우, 낮을수록 좋은 성능을 내는 것으로 평가됩니다)
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.1 2021.07.13 데이터 추가 개방 1.0 2021.06.30 데이터 최초 개방 구축 목적
- 안내 로봇이 사람과 보다 자연스러운 인터랙션을 하기 위한 1인칭 시점에서 사람과의 인터랙션하는 데이터셋
활용 분야
- 수집한 데이터셋을 통해 학습한 로봇은 다양한 시나리오에 접목 가능
1. 안내 서비스 AI연구원, 대형 마켓, 회사 등 고객들 대상으로 안내 서비스 수행
2. 돌봄 서비스 사회적 약자 돌봄 서비스 수행 및 일반 가사 서비스 수행
3. 교육 서비스 유아 교육 및 아동 영어 교육 서비스 등 수행
소개
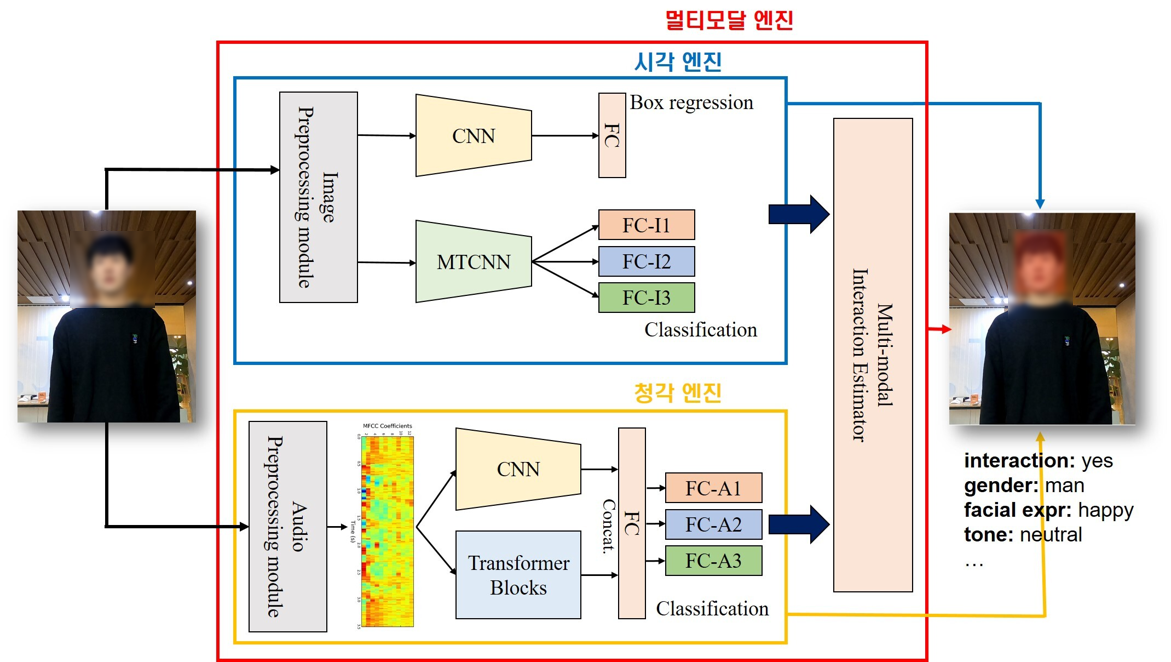
- 본 데이터셋은 일반적으로 영상, 음성, 멀티모달 데이터로 구성되며, 라벨별 데이터 구축은 인물, 발화 그리고 사용자와 로봇간 인터랙션으로 나눌 수 있다. 이 데이터셋은 인물 ID 100만 8천개, 발화자 ID 21만 6천개 그리고 사용자와 로봇간 인터랙션으로 구축된다.
4개의 안내 시나리오에서 positive sample의 분류 정확도를 멀티모달 평가지표로 정의할 수 있다. 1~4의 안내 시나리오는 각각 40%, 30%, 20%, 10%의 분포로 데이터를 수집한다.
1. 영상에서 사람이 등장하고 음성 정보 또한 로봇에게 안내와 관련된 발화를 한 경우 (positive sample)
2. 영상에서 사람이 등장하지만, 음성 정보가 안내와 무관한 노이즈 (ex. 주변 소음, 사람 간의 대화)일 경우 (negative sample)
3. 영상에 사람이 등장하지 않고 안내와 관련된 발화를 한 경우 (positive sample)
4. 영상에 사람이 등장하지 않고 음성 정보가 안내와 무관할 경우 (negative sample)
시나리오를 크게 상기와 같이 1~4 시나리오로 분류하였고, 정상적인 안내 상황인 시나리오 1번은 아래 6가지 세부 시나리오로 분류한다. 안내 요청 (20%), 기타 요청 (10%), 인사 (30%), 진술 (10%), 위치 질문 (20%), 기타 정보 질문 (10%)로 세분화한다.
구축 내용 및 제공 데이터량
- 1) 영상
- 원시데이터: 로봇 관점 영상 500시간 (mp4 포맷), 음성 300시간 (멀티모달 데이터의 특성상, 음성은 영상에 포함되어 있음)
- 정제데이터: 로봇 관점 영상 클립 216,000개 (mp4 포맷) (사용자가 발화하는 시간외 영상 제거, 필요시 비식별화 처리)
- 가공 후 데이터: 이미지 기준 1,008,000장에 대한 bounding boxw정보, 사용자의 표정, 시선 정보, 발화의도, 발화 어조, 시선 (json포맷)
- 2) 멀티모달 데이터
- 원시데이터: 위 영상 데이터
- 정제데이터: 위 영상 데이터
- 가공 후 데이터: 시각/음성/텍스트 정보를 기반으로 사용자가 안내 로봇과 인터랙션을 수행하는지 여부에 대한 라벨링
(이미지 1,008,000에 대한 라벨링, json 포맷)
필요성
- 안내 로봇시장의 세계 시장규모가 점점 커짐에 따라 세계 시장을 선도할 필요성이 대두됨
- 하지만, 현재 안내 로봇의 경우 사용자와 인터랙션을 하지 못하면서 일방적인 정보만을 전달하는 안내 로봇의 현실
- 인공지능 기술과 데이터 구축을 통해 돌파가 가능하며, 인간 수준의 사회적 기능을 수행하는 안내 로봇 기술을 실현하기 위해서는 데이터 기반(Data-driven)의 학습 및 추론 기술이 필요
- 본 과제에서는 안내 로봇의 글로벌 시장을 선도할 수 있는 성능을 갖출 수 있도록 인공지능 학습을 위한 멀티모달(Multi-Modal) 데이터 수집을 목표로 함
데이터 구조
- 1. 데이터 구성
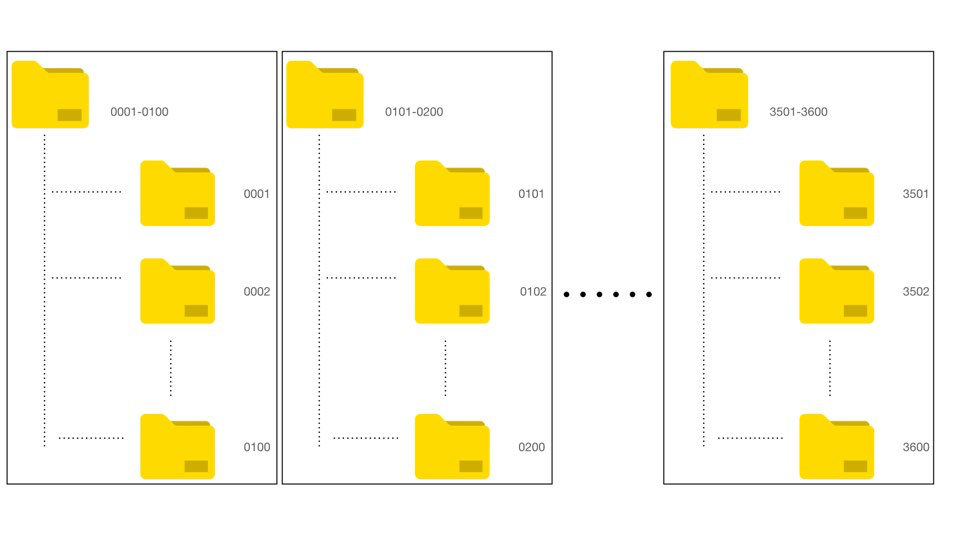
- 데이터는 가능한 클래스의 조합 총 3600개 (성별 2 x 시선 6 x 감정 5 x 의도 6 x 어조 5 x 인터랙션 여부 2)의 디렉토리로 구성. 라벨링된 클래스가 같은 데이터는 동일한 디렉토리에 저장됨
- 파일명은(날짜)-(시간)-(장소)-(구분자1)-(시점)-(구분자2)-(클립순서)-(추출 time step)의 규칙을 따름
- 2. 어노테이션 포맷
어노테이션 포맷 표 데이터 타입 속성 값(예시) 값 타입 설명 영상
(이미지,
오디오)from_name 'bbox' 문자열 바운딩박스 라벨 이름 id 'MBfmwFbIkh' 문자열 이미지 ID image_rotation 0 정수 이미지 회전 original_height 1080 정수 이미지 높이 original_width 1920 정수 이미지 너비 parent_id None None 해당 항목의 부모 라벨 ID
(사용되지 않음)source '$image' 문자열 데이터 타입 to_name 'image' 문자열 라벨링 원천이 되는 데이터 타입 type 'rectanglelabels' 문자열 라벨 타입(바운딩 박스를 그리는 형식) value {'height': 20.2323,
'rectanglelabels': ['man'],
'roatation': 0,
'width': 9.19,
'x': 48.4
'y': 38.1}사전 하위항목 사전화 height 20.2323 실수 바운딩 박스 높이 rectanglelabels ['man'] 리스트 안의
문자열바운딩 박스된 인물 성별 라벨값 rotation 0 정수 바운딩 박스 회전 width 9.19 실수 바운딩 박스 너비 x 48.4 실수 x축 좌표 y 38.1 실수 y축 좌표 from_name 'gaze' 문자열 인물을 바라보는 카메라 시선 라벨 이름 id 'Mm9Vm1HvYP' 문자열 해당 라벨 ID to_name 'image' 문자열 라벨링 원천이 되는 데이터 타입 type 'choices' 문자열 라벨 타입
(여러 개 클래스 중 하나를 선택하는 형식)value {'choices': ['back']} 사전 하위항목 사전화 choices ['back'] 리스트 안의
문자열바운딩 박스된 인물을 바라보는 카메라의 시선값 from_name 'emotion' 문자열 인물의 감정 라벨 이름 id 'Zo7YdW0I3S' 문자열 해당 라벨 ID to_name 'image' 문자열 라벨링 원천이 되는 데이터 타입 type 'choices' 문자열 라벨 타입
(여러 개 클래스 중 하나를 선택하는 형식)value {'choices': ['angry']} 사전 하위항목 사전화 choices ['angry'] 리스트 안의
문자열바운딩 박스된 인물의 감정 값 from_name 'text' 문자열 인물의 발화 텍스트 라벨 to_name 'video' 문자열 라벨 타입 type 'textarea' 문자열 라벨 타입(텍스트를 입력하는 형식) value {'text': ['안녕하세요']} 사전 하위항목 사전화 text ['안녕하세요'] 리스트 안의
문자열바운딩 박스된 인물의 발화 텍스트 값 from_name 'tone' 문자열 인물의 발화 어조 라벨 id 'mnFOCjI944' 문자열 해당 라벨 ID to_name 'video' 문자열 라벨링 원천이 되는 데이터 타입 type 'choices' 문자열 라벨 타입
(여러 개 클래스 중 하나를 선택하는 형식)value {'choices': ['angry']} 사전 하위항목 사전화 choices ['angry'] 리스트 안의
문자열바운딩 박스된 인물의 발화 어조 값 from_name 'intent' 문자열 인물의 발화 의도 라벨 id 'mnFOCjI944' 문자열 해당 라벨 ID to_name 'video' 문자열 라벨링 원천이 되는 데이터 타입 type 'choices' 문자열 라벨 타입
(여러 개 클래스 중 하나를 선택하는 형식)value {'choices': ['statement']} 사전 하위항목 사전화 choices ['statement'] 리스트 안의
문자열바운딩 박스된 인물의 발화 의도 값 from_name 'multimodel' 문자열 바운딩 박스된 인물의 인터랙션 여부 라벨 id 'zgxtbjoOgK' 문자열 해당 라벨 ID to_name 'video' 문자열 type 'choices' 문자열 라벨 타입
(여러 개 클래스 중 하나를 선택하는 방식)value {'choices': ['no']} 사전 하위항목 사전화 choices ['no'] 리스트 안의
문자열바운딩 박스된 인물의 인터랙션 여부 값
-
데이터셋 구축 담당자
수행기관(주관) : 서울대학교
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 장병탁 02-880-4258 btzhang@snu.ac.kr · 데이터구축 총괄 · 데이터 정의 및 설계 · 데이터 가공 웹서비스 개발 · 데이터 수집, 정제, 가공, 검수 총괄 · 데이터 배포 (API 기반 배포) · 로봇 응용서비스 개발 수행기관(참여)
수행기관(참여) 기관명 담당업무 유탑소프트 · 데이터 가공 웹서비스 개발 및 가공 툴 개발
· 데이터 수집, 저장, 정제, 가공, 검수 지원 로봇 응용서비스 개발퓨처로봇 · 데이터 수집, 저장, 정제, 가공, 검수 지원
· 로봇 활용오픈링크 시스템 · 데이터 수집, 저장, 정제, 가공, 검수 지원
· 데이터 가공 툴 개발로보쓰리 · 데이터 수집, 저장, 정제, 가공, 검수 지원
· 로봇 응용서비스 개발
· 로봇 활용데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 장병탁(서울대학교) 02-880-4258 btzhang@snu.ac.kr
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.
오프라인 데이터 이용 안내
본 데이터는 K-ICT 빅데이터센터에서도 이용하실 수 있습니다.
다양한 데이터(미개방 데이터 포함)를 분석할 수 있는 오프라인 분석공간을 제공하고 있습니다.
데이터 안심구역 이용절차 및 신청은 K-ICT빅데이터센터 홈페이지를 참고하시기 바랍니다.

국방데이터 개방 안내
본 데이터는 국방데이터로 군사 보안에 따라 AI허브에서 데이터를 제공하지 않으며,
군 담당자를 통한 별도의 사용 신청이 필요합니다.
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 safezone1@aihub.kr 또는 02-525-7708, 7709로 문의